I’m using a Pixracer autopilot from mrobotics and also the mrobotics uGPS/compass unit. Arduplane 3.8.2 and Mission Planner 1.3.50.
The compass calibrates fine and everything works well - until I power up the motor. With the motor running Mission Planner reports that the EFK is failing (compass indicator turns yellow). At full power the EKF compass indicator goes red.
I moved the GPS/compass about 20 inches away out onto the wing, but I still get the condition. It must be that the ESC and associated wiring is directly below the Pixracer in the fuselage. The motor is about eight inches forward of the Pixracer.
An idea:
The system automatically designates each of the 3 compasses (1 external, 2 internal) as numbers 1, #2, and #3. My experience is that it designates the external compass as 1 if detected. Have you verified that #2 is in fact the external one?
If in fact #2 is not your external compass, that could explain your problems…
(a quick check is to detach the external compass from your airframe and rotate it by hand while leaving the airplane still. You should observe changes in Mag2 in the Status tab in Mission Planner, while Mag1 and Mag3 remain fairly unchanged)
I think you are on to this problem. With compass #2 designated as the one external compass, actually turning the comas by hand does not change the heading seen in Mission Planner - so #2 may still be the internal compass.
However, I tried configuring compass #1 with the same results! #3 would not even respond at all.
Here’s a basic question: Do I need a separate cable for the compass part of the GPS unit? I am currently using only a single cable and the GPS works.
I might still be able to help… could you send links to the relevant GPS and Pixracer documentation? Or if there’s no documentation, perhaps the link where you purchased them?
I’ve never worked with a Pixracer, so I don’t know how much I can help.
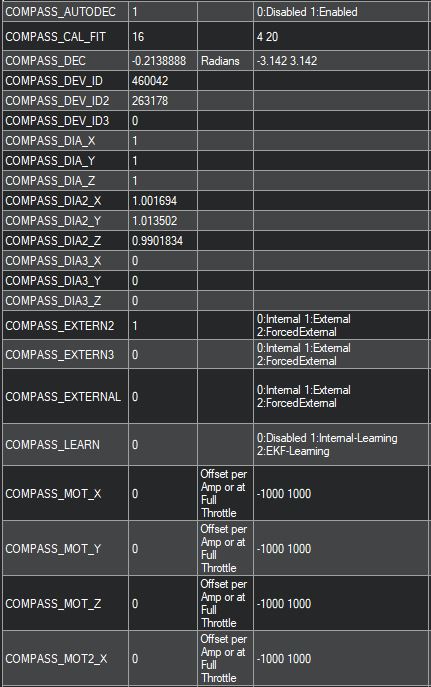
An idea: each detected compass sets a COMPASS_DEV_ID parameter for all 3 compasses. I think 0 = not-detected. Those might give clues whether the compass is never detected, or is detected but not functioning correctly because of some configuration/parameter issue?
Can you check the parameters using the “Full Parameter List” (or something similar) in the Config/Tuning tab of Mission Planner? You’ll have to be connected to your vehicle.
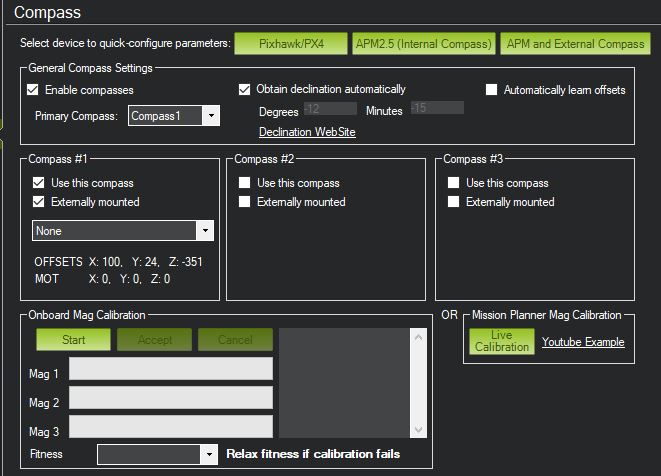
Still trying to sort how to run with a single external compass; below is an excerpt of my configuration:
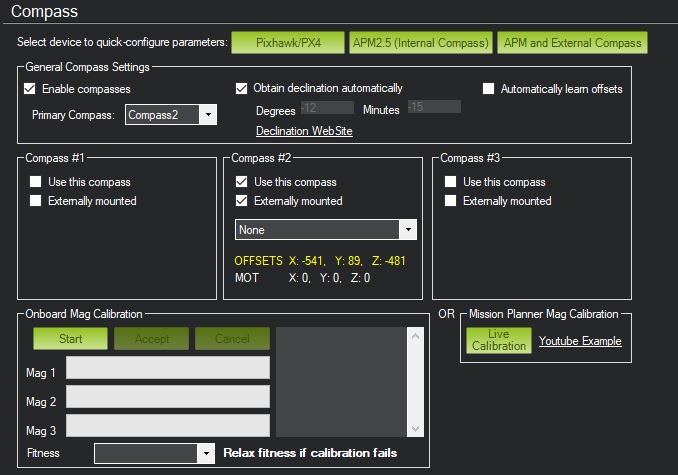
In the Mission Planner GUI I have:
Enable Compasses = checked
Primary Compass = 2
In the Compass #2 box I have both “Use This Compass” and “Externally Mounted” checked, and no rotation.
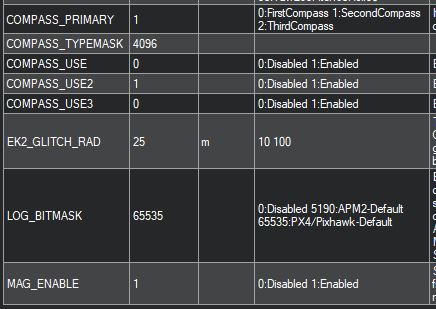
Excerpts of the compass section from the parameters file. I appears that both compass #1 and #2 may be active. Am I reading this correctly? If so, how can I turn off the internal compass(es)?
Also spent more time unsuccessfully after reading about compasses in Advanced Compass Configuration in the Docs. No joy yet.
I currently have this setup, but it doesn’t work. The heading is off by something between 90 and 180 degrees, and whenever I turn the plane I get the ERROR COMPASS VARIANCE ERROR.
New Pixracer, Arduplane 3.8.2, Mission Planner 1.3.50.
Any ideas? I’m watching a beautiful day pass me by because I have no working compass.
I think the first thing to determine is whether or not your external compass is being correctly connected, detected, and then communicating with your system. Have you already verified this? If so, how?
If you don’t know how to do this, one idea: Post the values of your COMPASS_DEV_ID parameters, that might help us figure it out.
Configured the compasses again to the only settings in which they give sensible headings - compass #2 as primary. But the system still generates ERROR COMPASS VARIATION and COMPASS HEALTH alarms:
Note that I was able to take a flight and even run a small automated mission - during most of which the compass errors persisted, and during which I was ready to switch to manual mode if things went bad. Most interesting.
I see that your Dev ID’s are 460042 and 263178. Will you do a little test for me? Will you find the Dev ID’s with the external compass+GPS disconnected?
Follow these steps:
disconnect from MP,
disconnect your external GPS/compass from your Pixracer,
re-boot your pixracer by un-powering and re-powering it, and then
connect with MP
Whichever Dev ID is missing is your external one. If both Dev ID’s are there while the external is physically disconnected, I don’t think your external is being connected correctly, and we’ll need to figure out why.