Hello Everyone.
Apart from my perpetual issues with the INS, I have a host of questions that I simply cannot find any information on. Sadly, despite my best efforts, I cannot find a decent source of information on the Pixhawk. There seem to be quite a few different resources available, some more complete than others, and some offer conflicting information. I really have tried to answer these questions myself but I cannot.
First off. Power.
Some sources state that the Pixhawk is “Servo rail high-power (7 V) and high-current ready”. Yet another states, “The power module is NOT suitable for powering servos. It is solely intended for the autopilot - so the system needs an additional BEC or an ESC with integrated BEC.”
What is the story here then? If it makes any difference, I am speaking in particular with regards to fixed wings…
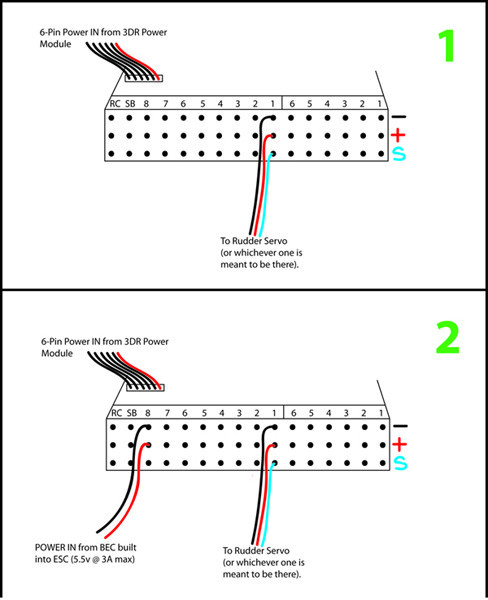
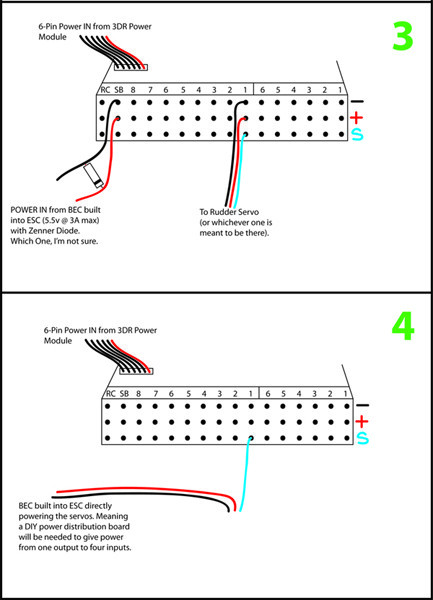
If I plug my battery into the 3DR power module and plug the six pin connector into the Pixhawk power port on the top, will I then be able to plug my little 9g servos directly by plugging them into the servo rail? IE, the rudder servo can plug right into the +, - and signal pins and be powered just fine?
Or do I need to supply power from my ESC (which has a 5.5v BEC) to my servo rail by simply plugging + and - from the BEC into any available + and - RC input?
If the second option is required, am I correct in assuming that a Zenner diode will be needed to protect the servo rail from voltage spikes?
Next up is some more power questions…
The AUX outputs and their power needs…
To operate a relay or a LED or anything using the DO_DIGICAM_CONTROL, with the servo option, additional power needs to be supplied to the AUX rail by proving 5v to any of the available + and - AUX pins not in use, correct?
I’ve done this but the output isn’t enough to trigger even a 3.3v relay and only barely lights up an LED. I have not tested the output values with a multimeter. This is how I’ve wired it as per the instructions from 3DR:
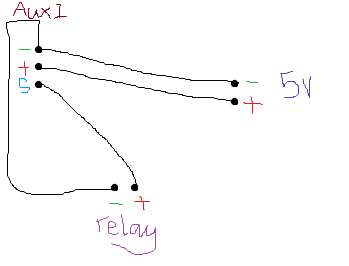
Where am I going wrong?
Next up is a basic question I simply need some confirmation on…
During the compass calibration, should one point the axis magnetic North? It is magnetic North, right? Not due North?
On the compass again, I get told I should get “133 90” samples. That is a pretty unrealistic number, what is the real world optimum?
Thank you, folks. Any help will be much appreciated and dutifully paid forward.
KD.