From your previous answer it looks there are no adverse effects so i guess it would be nice to have a better yaw at the expenses of a negligible efficiency drop.
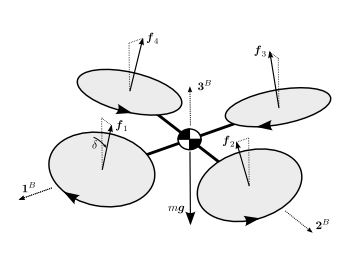
Can someone help me understand the difference between a “radial tilt” and a “circumferential tilt”? Maybe a little diagram or link?
From reading this post it seems a radial tilt is discouraged and a hack for crappy flight controllers. But circumferential is completely valid for increasing yaw authority. Am I understanding correctly?
Thanks. I can’t see clearly in the videos above, I’m still a bit confused what the physical difference between a radial and circumferential tilt is. Do you have a picture you could post that helps explain this?
Yes, that would seem to be the sweet spot. It’s a small angle to control for but I suppose if you have a good way of mounting the motors so they are at equal angle it’s beneficial.
I came across this post and I think it’s interesting. I would like to try it on my quad.
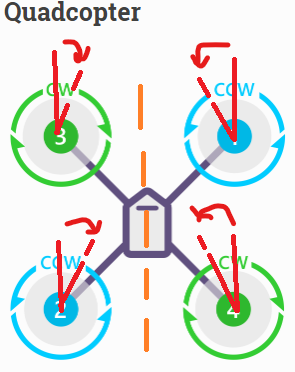
I’m unsure what you mean by “tilting motors in the direction of torque” Does it matter if I tilt the rotors inward (toward the orange line) or outward (away from the orange line)?
@vicson that would be the wrong way. the tilt has to result in a torque that is in the same direction as the power torque; e.g. opposite the rotor spin.
for this x-quad, you want the front props blowing towards the front, and the back props toward the back.
I realize I never followed up on this thread. Tilting 6 degrees has worked wonderfully for my x-quad. Unfortunately I dont have any hard numbers but efficiency difference is negligible and yaw authority is noticeably stronger. I will incorporate at least 3-6 deg of tilt in all my builds.