Dear all,
While I test the spline waypoint, I notice that paths of spline waypoint is the same as normal waypoint on current master version.
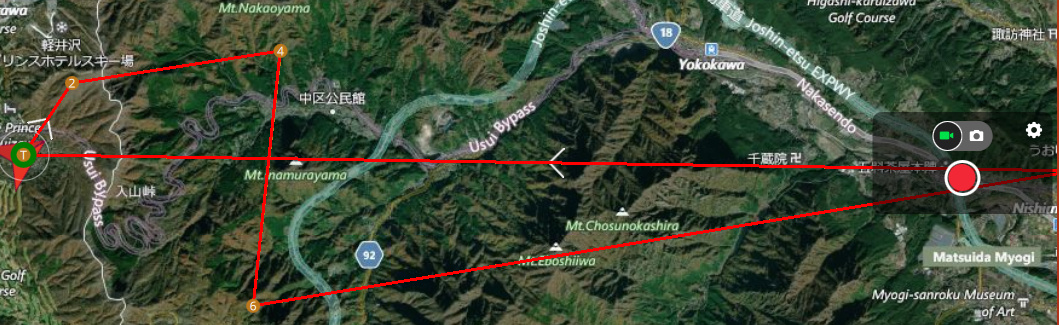
When I run the mission in the above, the master version shows the straight paths as shown in the below.
On the other hand, when I run the same mission on ArduCopter V4.1.0-dev, it shows correct spline paths as shown in the below.

Is this already known issue?
You could reproduce the issue for the following steps:
- ./Tools/autotest/sim_vehicle.py -v ArduCopter --console -w --speedup=10 -L Karuizawa
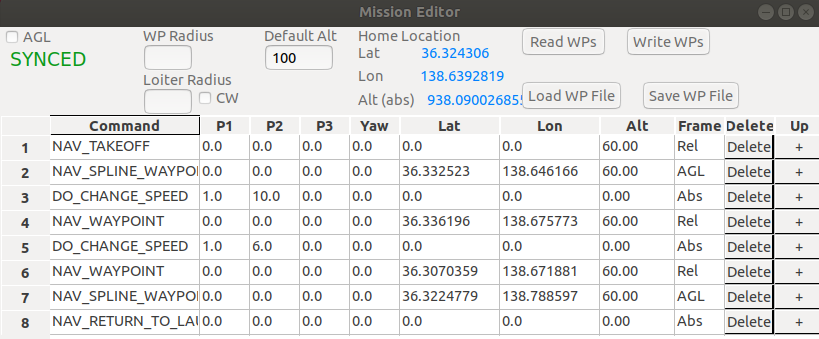
- upload the mission (I have attached)
- param set RTL_ALT_TYPE 1
- Mission: https://drive.google.com/file/d/1LECjpuNsDsdvcCnl76GH_Sojia4lnp13/view?usp=sharing
- Master version log: https://drive.google.com/file/d/1OuO3Vp65MgCI8HprcUFkl-Wa2fZxcmq5/view?usp=sharing
- ArduCopter V4.1.0 log: https://drive.google.com/file/d/11cWXE9DHaJ5o7W0ztIWfYCGGKgPtReR3/view?usp=sharing
Edit: It seems that using different altitude frame is the key to trigger this issue. For example, if MAV_CMD_NAV_WAYPOINT uses relative altitude , leveraging MAV_CMD_NAV_SPLINE_WAYPOINT with terrain altitude leads to this issue.