As the title says, can the SITL simulation fly from a point to a point on the map and a point on the real world match?
Yes they match.
That is the purpose of the sitl. To simulate reality
Okay, just like the problem I encountered in another post, I am using SILT
When it is found that after flying for a certain distance, the attitude of the vehicle will become unstable when the GPS is in the control mode, such as auto, Guided, and Loiter modes. It will not be like this if it is not in the GPS mode. What is the reason? Thank you
Can you post the sitl log?
OK,In fact, I plan to use SITL flight data to guide another vehicle to fly. Does this work?
Could be related to this problem, how far did you fly?
Ok. Please wait for a moment…
In fact, I didn’t fly far, about 2~3km, but I used the stable version of the released copter code instead of the master branch. I don’t know if this is the reason. I will upload the log later. Thank you
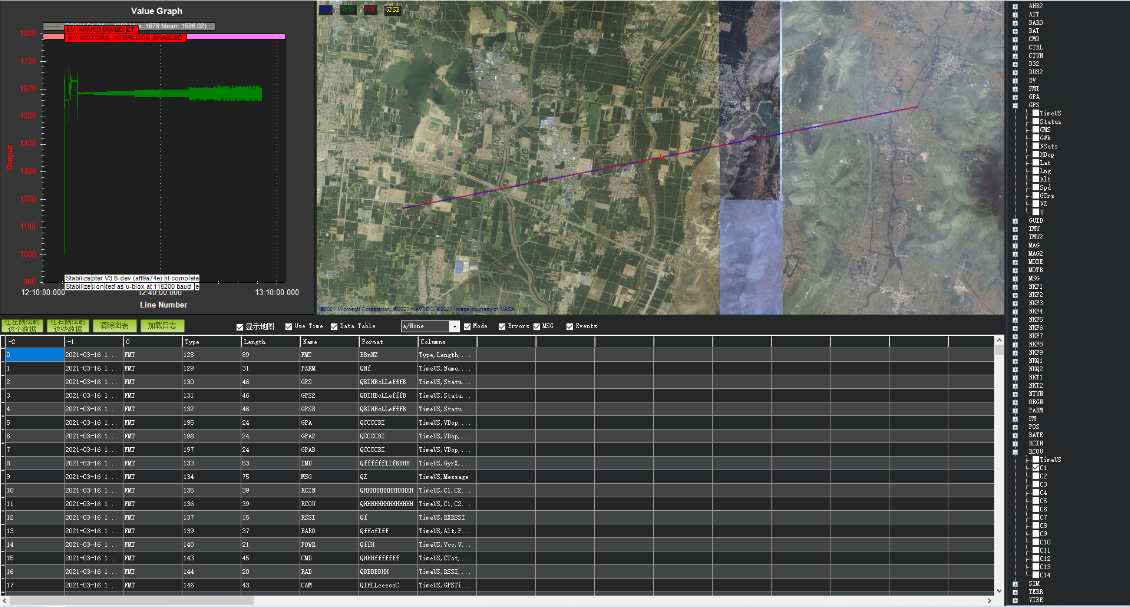
sorry,Due to restrictions, I cannot upload log files. I took a screenshot. This is the output of RCOUT CH1 and found that as the distance increases, it starts to diverge. What is the reason?
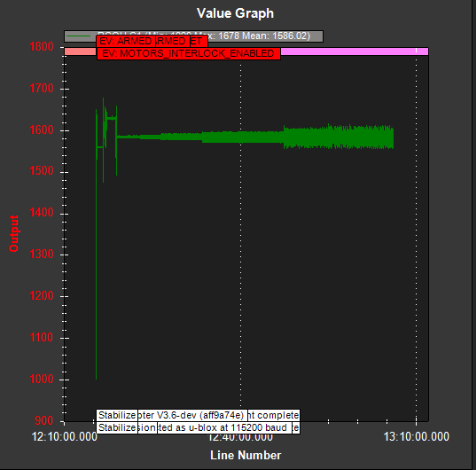
RCOUT CH1
Without the log file it’s not possible to know what is causing this. Can you upload the log to a file sharing site (google drive or Dropbox for example), and post a link to it?
OK, I found a way to share files online, the link is here:
https://www.jianguoyun.com/p/DVHFRtoQxaGnCRjS1eYD