https://drive.google.com/file/d/1XZKaC1UBztMk6INbGB8EFYrQDfDbu7IX/view?usp=sharing
Nope, it has an access requirement. And asking that question is like asking “can someone help me with my car”.
Out of gas?
Flat tire?
Failed piston return spring?
Broken Johnson rod?
Or low blinker fluid 
Can someone help me decipher this bin file my quad is moving around a lot in loiter mode and when I switch to pos hold it lifts off
https://drive.google.com/file/d/1XZKaC1UBztMk6INbGB8EFYrQDfDbu7IX/view?usp=drivesdk
Yaw tuning is poor, but pitch and roll looked OK
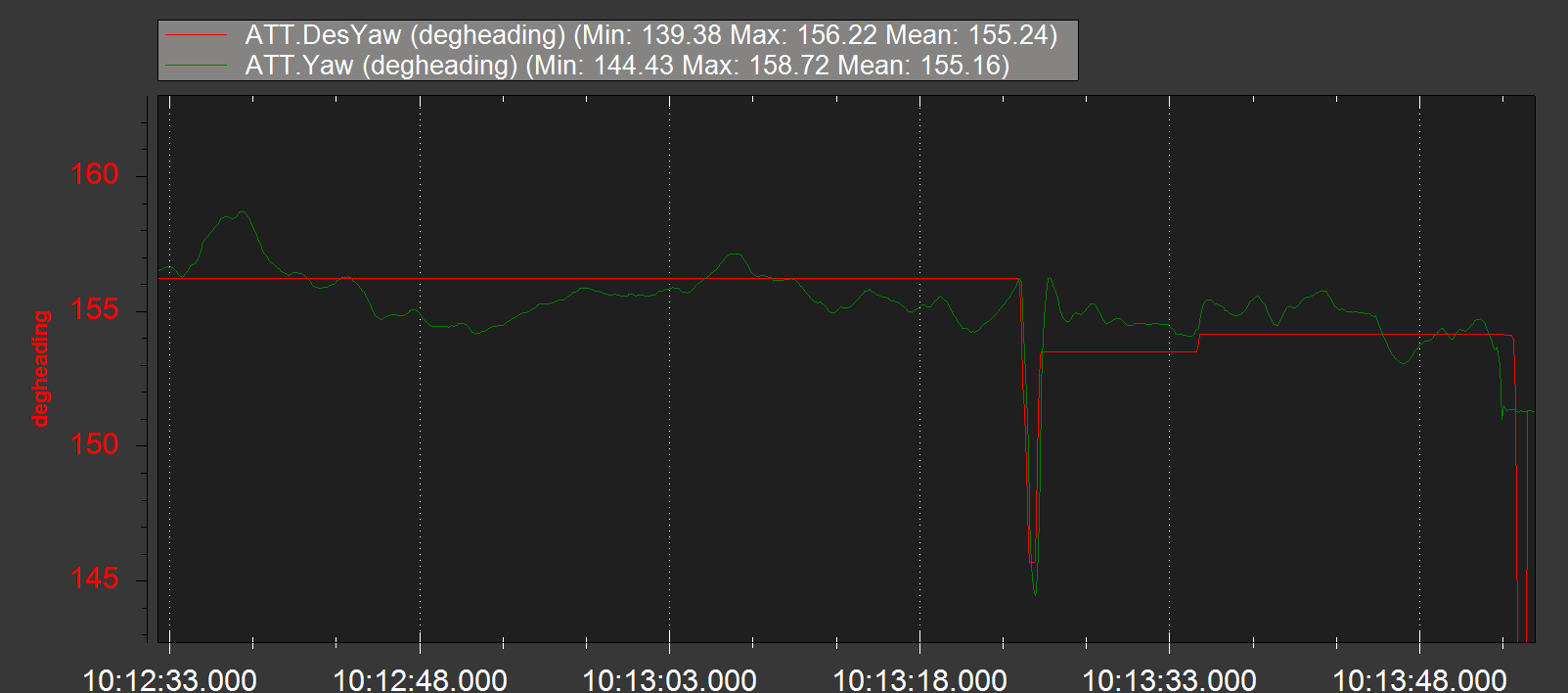
There’s some physical yaw bias like a twised motor mount or excessive frame flex
Your Vcc (5 volts DC to the flight controller) is low and will likely cause a brownout/crash one day.
Maybe upgrade your power brick or try adding an electrolytic cap across the 5v
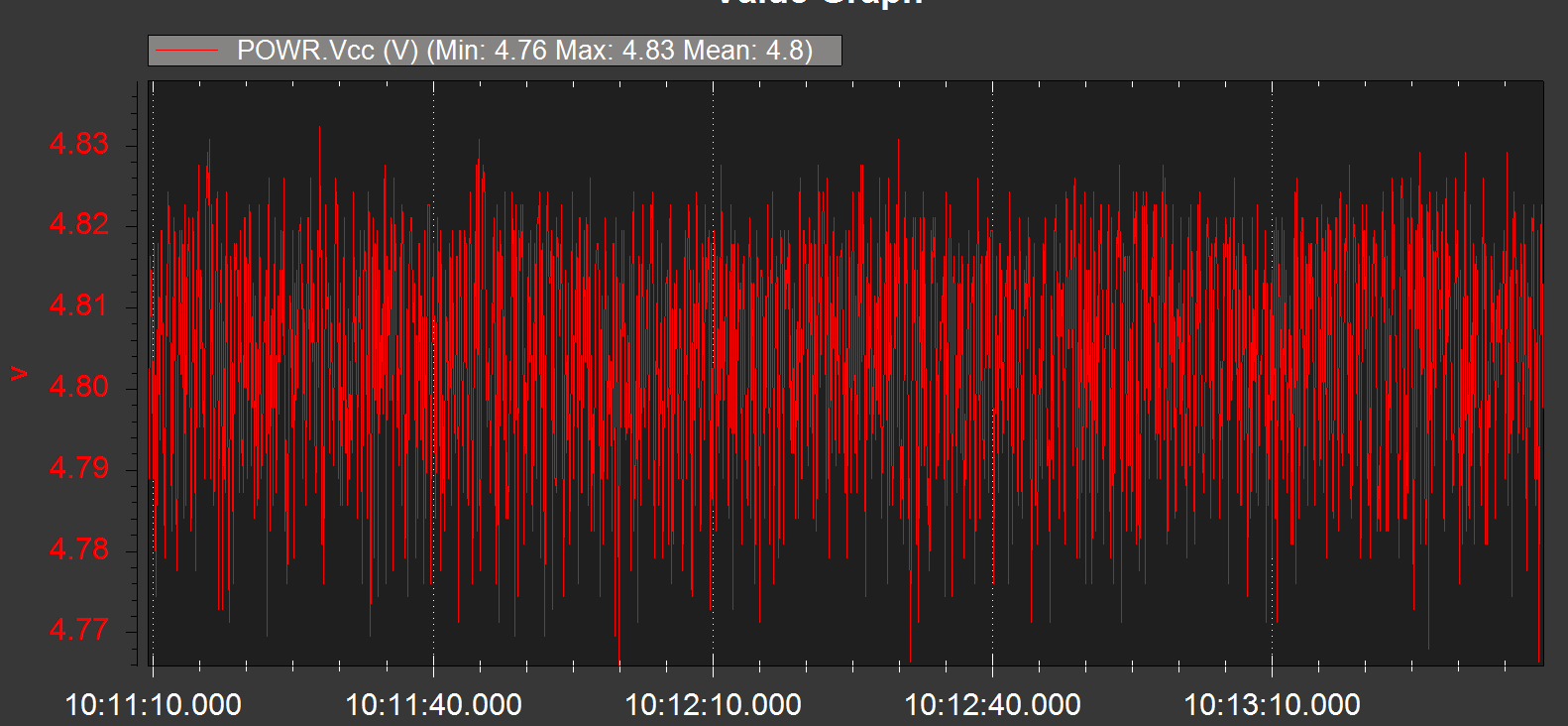
The 5vdc issue could help with GPS reliability too, although I couldnt see an issue with number of sats or HDOP. I think the wandering behaviour is because of tuning and that yaw issue.
It seems you might not have followed the Tuning Guide and you can use the MissionPlanner plugin by pressing Alt A
https://ardupilot.org/copter/docs/tuning-process-instructions.html
2 Likes
I will look over the tuning guide this is the third pm I have had with low voltages
What Flight Controller? It could be just an issue with voltage measurement from the processor. I had one like that.
It’s a pixhawk 2.4.8 I bought 2 years ago
If the power module is supplying 5.37V, which they should, then there is nothing you can do.
I will check the power module output voltage will have to find a pin out somewhere
I have been looking over the tuning process and not sure what to do here
- ATC_RAT_PIT_FLTD : INS_GYRO_FILTER / 2
- ATC_RAT_PIT_FLTT : INS_GYRO_FILTER / 2
- ATC_RAT_RLL_FLTD : INS_GYRO_FILTER / 2
- ATC_RAT_RLL_FLTT : INS_GYRO_FILTER / 2
- ATC_RAT_YAW_FLTE : 2
- ATC_RAT_YAW_FLTT : INS_GYRO_FILTER/ 2
Connect the quad to MissionPlanner and press Alt A to set a bunch of initial parameters
Alternatively you can use this spreadsheet
F100, that first parameter is the one you are looking to set, and everything after the colon is like an equal sign.
Earlier there was this line INS_GYRO_FILTER : 10Hz to 20Hz
So for that first parameter ATC_RAT_PIT_FLTD, whatever you put for that value in the INS_GYRO_FILTER, divide that by 2.
Regarding that power issue, you could try and upgrade your power module. I use the Mauch power modules. But its possible your pixhawk has an issue, or it could be the power module just has too much on it to handle (powering too many things). One solution is to add a second/backup power source. This can be done from powering the servo rail with a BEC. The RC + power on the back of the pixhawk is actually a separate power circuit from the servos next to it. Check out this document, down where it says “Powering/backup off the servo rail” for how to do all that. https://ardupilot.org/copter/docs/common-powering-the-pixhawk.html I’m looking into it also for myself. You’ll want to add the diode mentioned and possibly a capacitor as well.
Which brings up a question I’d been meaning to ask but not sure where. That diode seems difficult to get, 1N5339. But I do see the B version all over the place (1N5339B). Is that ok to use instead?
I set all those parameters I sent too 2 I guess I will have to reset it all to default
Good idea. Then use the Alt>A plug-in as Shawn suggested to set the initial parameters. That won’t fix your Yaw bias though, it’s most likely mechanical.
1 Like
Power module is putting out 4.72 volts when I hook up the 5.25 bec with capacitor a diode mod the rail voltage goes to 5.26 volts
If it was me, I’d get a new power module. It could still be the pixhawk, maybe test with the USB as power to see if it is over +5v. But cheapest thing to swap out is the power module. If yours is on the way out you don’t want it dying mid flight. Your pixhawk will keep going because of your power rail BEC setup but the power to the ESC can go out I think if those power modules fail. IIRC the Mauch sensors, even if the sensor fails the power doesn’t stop flowing because they use a hall effects sensors vs the cheaper style sensors used on most pixhawk power modules.
It’s 4.5 with usb and 4.7 with the power module I will order a new module as soon as I find one affordable and reliable the ones I’ve been getting from Amazon have low voltage I will check if I can bypass the voltage regulator on the power module and use a 5.25 volt bec in its place
I’d take one final look around the multirotor and see if anything you have powered off the pixhawk is having issues. Seems like something is shorted or draining your current, if this isn’t the first power module you’re having issues with getting over +5v. Guessing I’d say its not the power module or the pixhawk but some other issue putting load on your flight controllers power.
1 Like