Hi,
I have been using the Arducopter system for a few years now but first time posting an issue I can’t seem to figure out so I am reaching out to you guys.
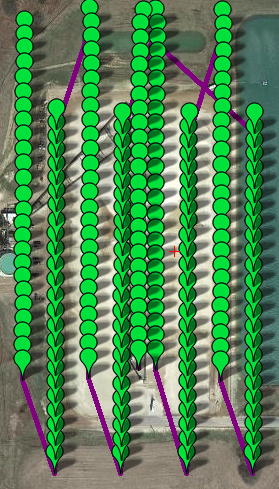
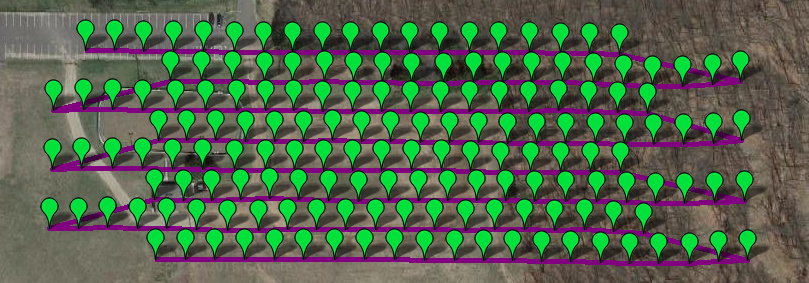
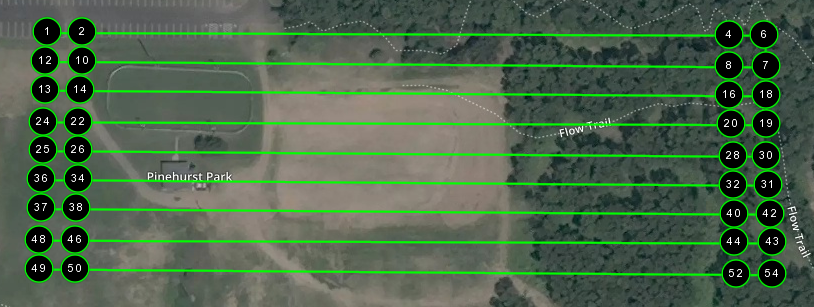
During a mapping (grid) mission with a camera being triggered based on distance the camera seems to stop triggering in the middle of a flight line without any reason (no commands to do so). Sometimes it starts back up and sometimes it doesn’t. If I fly the same mission twice it happens in the same spots in each mission. I have a camera trigger cable and a camera shutter feedback cable and I can see that the pixhawk told it to trigger but it didn’t. I would think it was a camera issue but it is repeatable mission after mission. This is a recent issue in the past few months and I have not had this in the past. The only difference is that it is winter where I am at.
I am using a hexacopter and a plane and having the same issue on both all different equipment except the camera and mission planner so it might be a camera issue but wanted to make sure nobody saw anything in the logs first before I buy a new camera.
I loaded 3 logs here https://www.dropbox.com/sh/jugqsuv4divvflt/AABhebQLMK89RmzkZH38ogIca?dl=0 ,
1 from my copter today and another from my copter and plane a bit ago.
Thank you for your time.