Good morning all.
This is the first time I have ever encountered this. I decided to get my second test machine setup to fly. I installed brand new Tekko 65amp esc and completed all the calibration.
Today I thought I would test arm it as the last thing before a maiden and much to my surprise it didn’t go well.
The machine armed just fine but the motors spun slowly.
Raising the throttle got the motors to speed up and then they suddenly on their own slowed down and started reporting a thrust loss. This FC has been flown on the same frame and motors. I even flew it with the same type of ESC. So I am puzzled by this.
This is the video
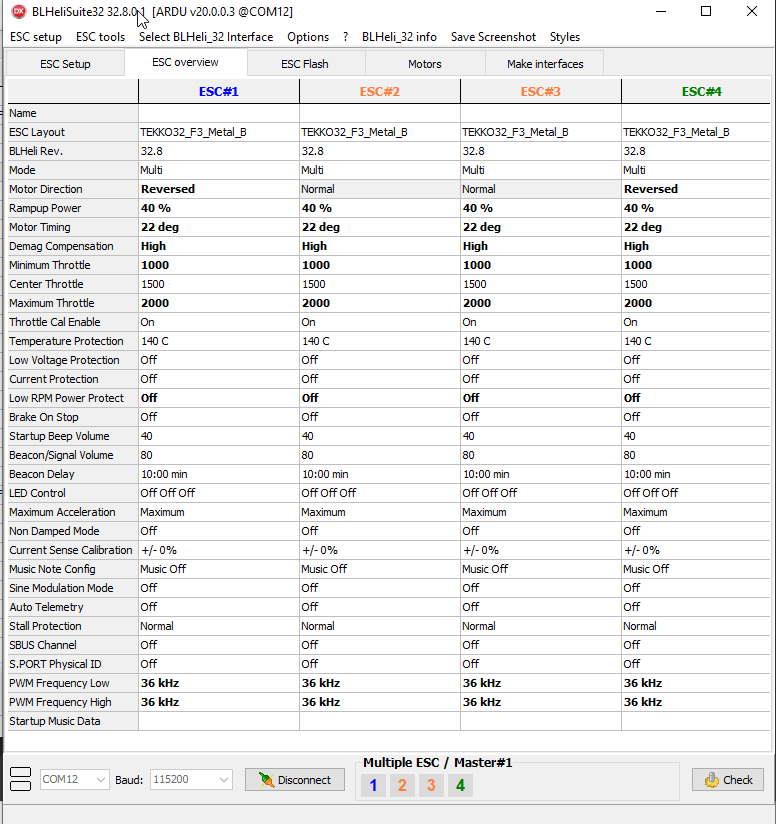
Screen grab of the Blheli config.
Hey Brandon.
\This machine has been cycled a few times.
The firmware is 32.8 which is the same as the other machine.
I did a side by side compare of the settings. Machine that does fly against the one I am trying to setup. They are identical.
So yes an MOR PRP…sorry I forgot you use that term for the Pixracers.
As for resetting the dshot. I assume you mean set the thing to Dshot and calibrate…I tried that.
during the setup at times i got a lot of strange stuff once in a blue moon, it possible you can just delete the old config and start vanilla. that always solved my setup issues.
Yeah I have seen strange as well.
I may do as you suggest, do a wipe and reinstall.
I am currently set to Dshot 300 on ArduCopter V4.0.7.
Here is the really odd thing, I replaced all the ESC because I couldn’t get the motors to spin on brand new ESC. Never been used. Now this oddness is happening.
Perhaps I will wipe and try again.
also motor test is the best way to see if your esc’s are working right as you know . if they are not spinning during the test something need fixing. Once in a blue moon i set Dshot to normal then do a calibration once working i set it back to dhot 300
.
try tuning dshot off and select “normal” run the esc calibration make sure the GPS is installed and the radio is calibrated with flightmodes first… that should set your inpoints.
Wow just reflashed it and as I was doing it I smelt something burning. Then it stopped, then I did a compass calibration and I got a puff of smoke. But I have not found from where yet.
Not sure the FC is working now.
Dam. I going to stick with 4.04 for now I got some descents flight with it. One of the guys I know recommends Aikon esc now that i can’t find my Spedix GS30 30A BlHeli 32’s
check the cap on the power in if you installed one. Since i normally fly 4s i don’t use one. BUT I did blow one last week when in the air figured it bridged as a user error…
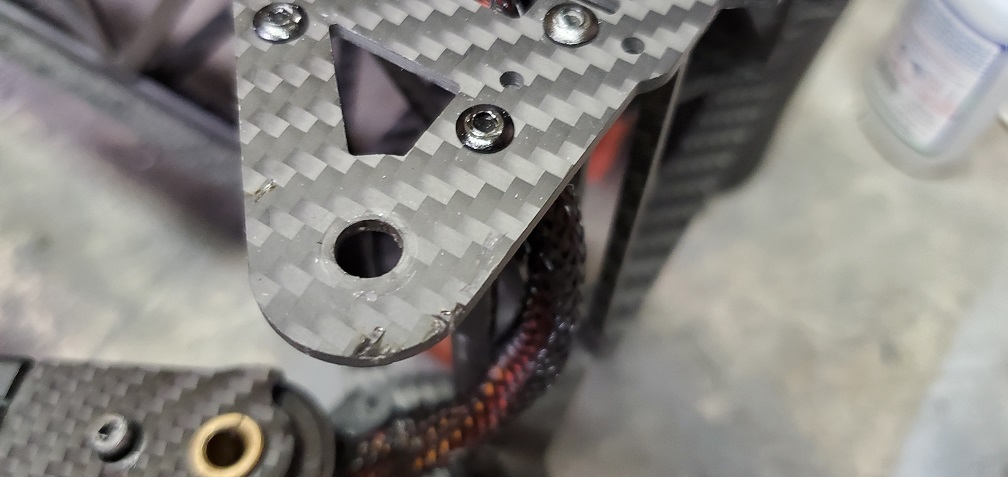
Well this is odd, I thought maybe I had put a screw into a wire and that went pop. But when I pulled the arm off and checked there was no damage and no smell. I then looked at the CF where teh USB cable touched the frame and it’s damaged. You can see it in the photo.
So then I did a test to see if the frame was grounded and it is…that should not be happening.
I will pull it apart to see what is causing the grounding to the frame. Thats a huge no no.
ok first mystery solved. I have a cut wire on ground and positive to the number 4 motor. This is the one reporting the thrust loss. I pulled it and another out to replace the wiring.
There was a short to ground and possibly a short across.
Also it looks like the telemetry wire was also damaged. This will mess with machine behavior big time.
So repairs to make then back to the arming issue. This may be the cause of it all.
So after two hours this morning
I have replaced the damaged power cables. Confirmed there is no short now.
Redesigned and then replaced two parts to reduce the potential for that occurring again.
Powered up the machine. Did a motor spin test. All good there.
Unfortunately I wiped the FC and so now need to copy the params back. Luckily I back them up.
Then is check motor level one more time.
Take it to the yard and arm test. See if the issue is resolved and if s to the field we go.
Motor testing by using the radio to arm and not having props on is a complete and utter waste of time.
The issue is, when you arm using the radio the PID controllers are active. In their active state the PID controllers are trying to stabilize and control the attitude of an aircraft that is not in the air. Consequently the PID controllers will get swamped and strange things happen. There must be a gazillion videos on noob tube that document this behavior.
Ha OldGazer I agree and disagree. While I completely understand the pid loop as you lay out. What you missed was that I had a thrust failure on motor 4. Thats not a pid loop related.
In this case it was a short on the main power to the motor and it was only by test arming that I understood I had a problem. I at first thought it was BLheli related but once on the bench again and I started digging into motor 4 I discovered the short.
So yes I agree that the testing with no props doesn’t tell you if the machine is fly worthy, but it does confirm it will arm and let you see if anything else is wrong.