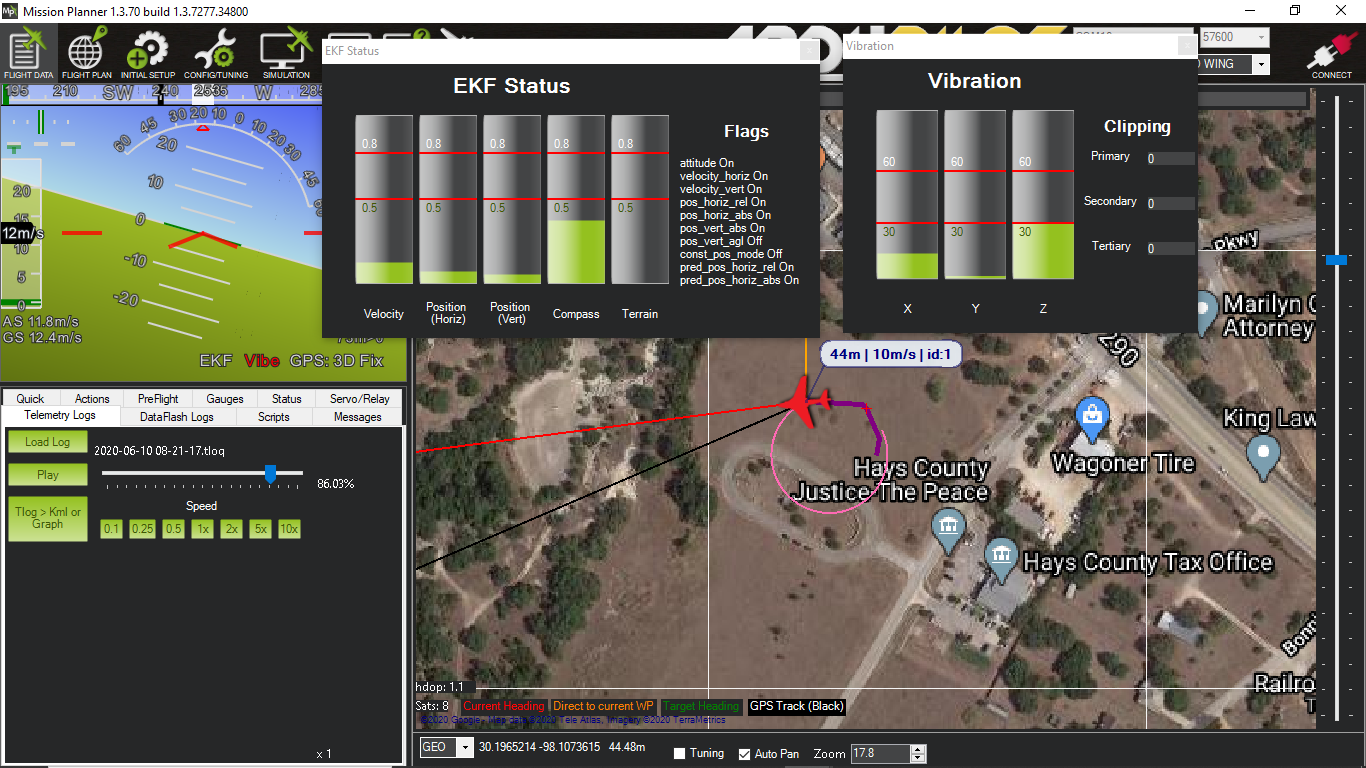
I’m wondering if I can get some assistance diagnosing a QuadPlane crash yesterday morning. I’ve done several hovers and everything worked flawlessly with the forward transition. I was blown away with how seamless everything went! The problem came about two minutes later as I was getting ready to transition back to hover and land. This was in FBWA mode as I was circling back to get on a steady flight path. My Bixler QuadPlane took a nose dive and slammed into the ground. I’ve been researching and looking at my bin log for the past day and the only thing I can come up with is that there was a compass issue. This was right at the start of the crash:
and here is a grab a minute or so before where everything appears to look fine:
Below is my binlog:
I’d greatly appreciate any advice from the community. I’m ready to get this bird back up in the air, but would like to gain an understanding of what went wrong before I do. If you’d like to see the build before it’s maiden you can see it here:
Andras, thanks for your response. Definitely something I had not considered, but could certainly be possible. It felt like I was keeping good airspeed but it was far enough away that it was hard to tell. I’ll feel like such an idiot if that’s the case! I will continue to look through the logs and believe this to be the best hypothesis so far. Will also add my airspeed sensor.
Here is a link to the flight if you care to watch. The dive happens starting around 1:20
Looking forward to getting back to the bench and in the air. Take care.
Peter, thanks for chiming in and pointing me to that param. I had seen it during setup, but said to myself “nah, I’m not going to need that…” guess I should have thought twice! The reality is I should have paid better attention and kept my throttle up given the plane was so far out. I will test out this param when I get back in the air.
Great video demonstration. I certainly should have considered that the stall speed would be higher given the way it was loaded up with all the components. Just wish I would have given it some nose down but it completely caught me off guard. Appreciate the insight.
Take a look at the Q_Assist stuff. Basically what it does is detect if the aircraft stalls or looses control in flight and automatically starts the quad motors to stabilise it. The classic example of this is a pilot here in Australia that had the servo directions reversed so as soon as they tried to transition the aircraft tried to flip upside down. The Quad motors started up and leveled the aircraft. The pilot only realised what the problem was after they landed to work out why the quad motors were not turning off and the aircraft was flying so badly.
Leonard, thanks for chiming in and sharing that experience. Sounds like the quad/plane modes were fighting against each other! I think I would have taken that over the stall I encountered but have learned a lot through this process. I’m heading back to the bench to give this another try…with the proper checks in place.
Just watched the video. Very cool build! Looking at a lot of Qplanes on the market they have one thing in common - quad props for hovering and one pusher for forward flight. Reading this thread with everyone mentioning the Q_assist parameter I’m starting to wonder if I should add a couple motors to our tri copter build.
Don’t give up on your tricopter! We are currently in the process of building one based off the mini-talon frame and perhaps one from zohd. Several years ago I experimented with the FireFLY6 which is a Y6 configuration to give a little more hover power. You can check it out here: