Before I proceed further, I want to run to ground all issues I am aware of. Short flight yesterday 6dec2020:
Quad, Pixhawk Clone (HW v2.4.6), MP v1.3.74 bld 1.3.756327684, Copter Legacy FW4.0.5, plastic props and plastic frame, Taranis X9D+ TX, Taranis X8R RX (SBUS from RX to Pixhawk clone).
Inflight EKFerr:
(upload://zZUpJmyq3NkxgH0Q6xOlQAOpBIG.png)
.bin file path: https://drive.google.com/drive/u/0/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
Can someone look at the bin file and suggest what I might do to resolve this before attempting any additional flights.
I am not sure how, or if, I should proceed. The ERR:EKFCHECK-2 concerns me. Does this mean my Kalman Filter is receiving erroneous information? The ArduPilot EFK page states that “most users should not need to modify any EKF parameters”
Can someone please respond to this and suggest how I might proceed.
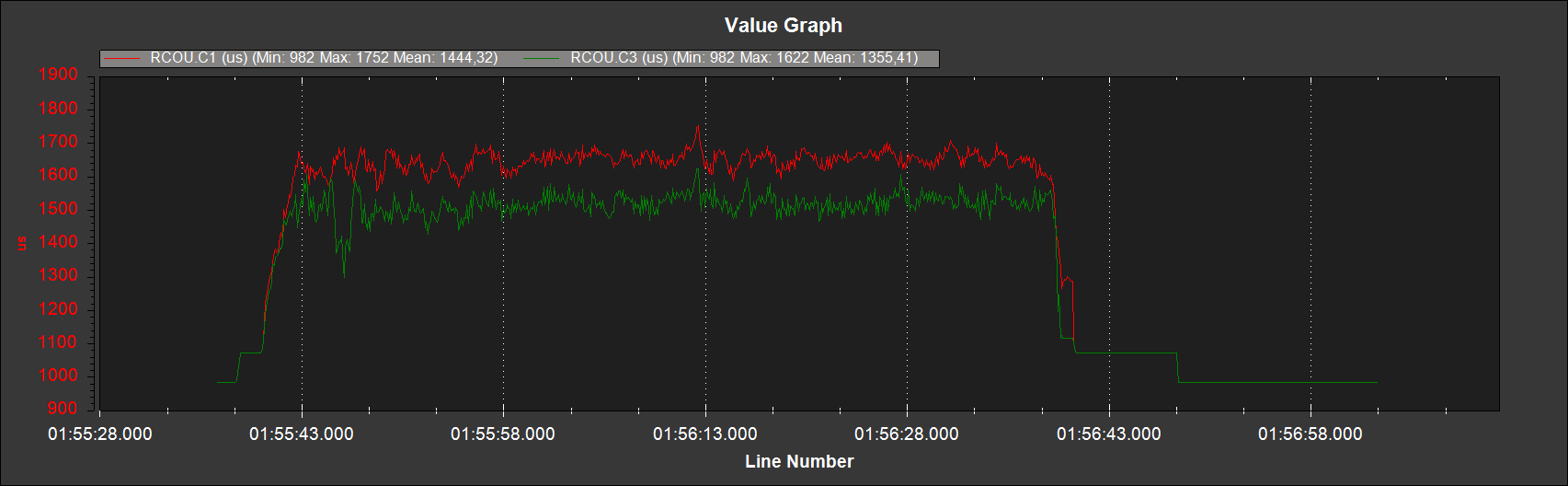
Hello! I took a look to your log file and I see some things you will have to solve. First your actual roll doesn’t follow very well to your desired roll. You should do an autotune following all the steps of this guide https://ardupilot.org/copter/docs/autotune.html:
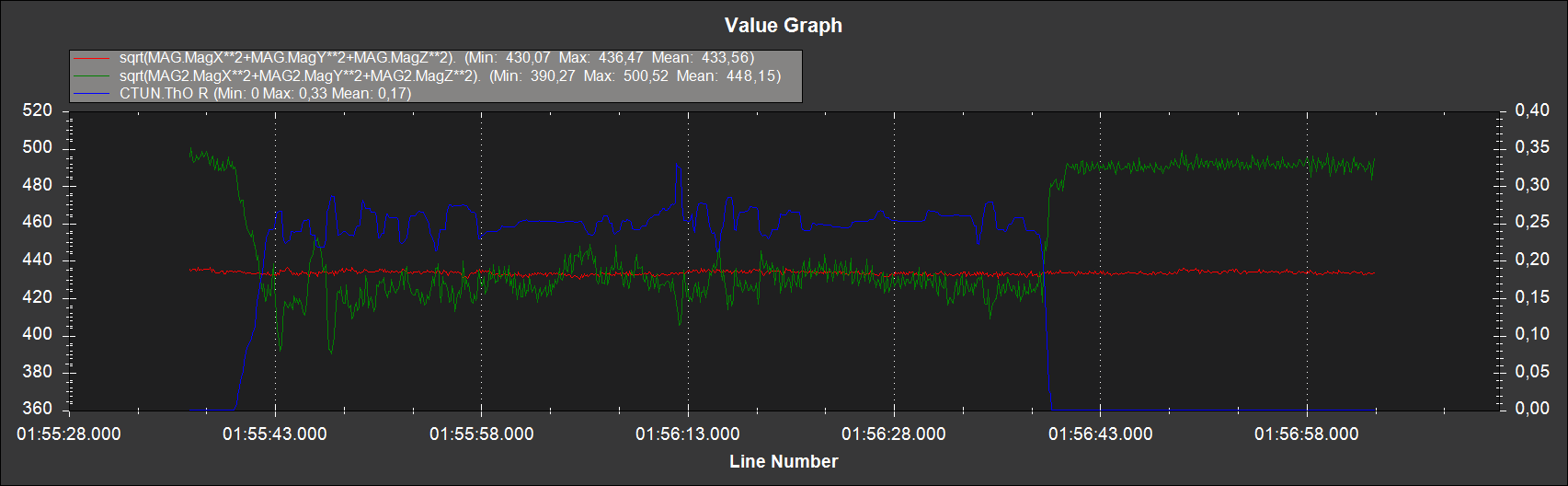
And you have problem with your second compass because it is being interfered by your motors or power cables. As soon as you raise the trottle, the magnetic field changes a lot.
davidae David, thanks for your input, I really appreciate it. I will work on the following and report back.
1 - Planning on conducting autotune but before I do this I wanted to eliminate as many other issues as I can since autotune can be problematic if there are other issues
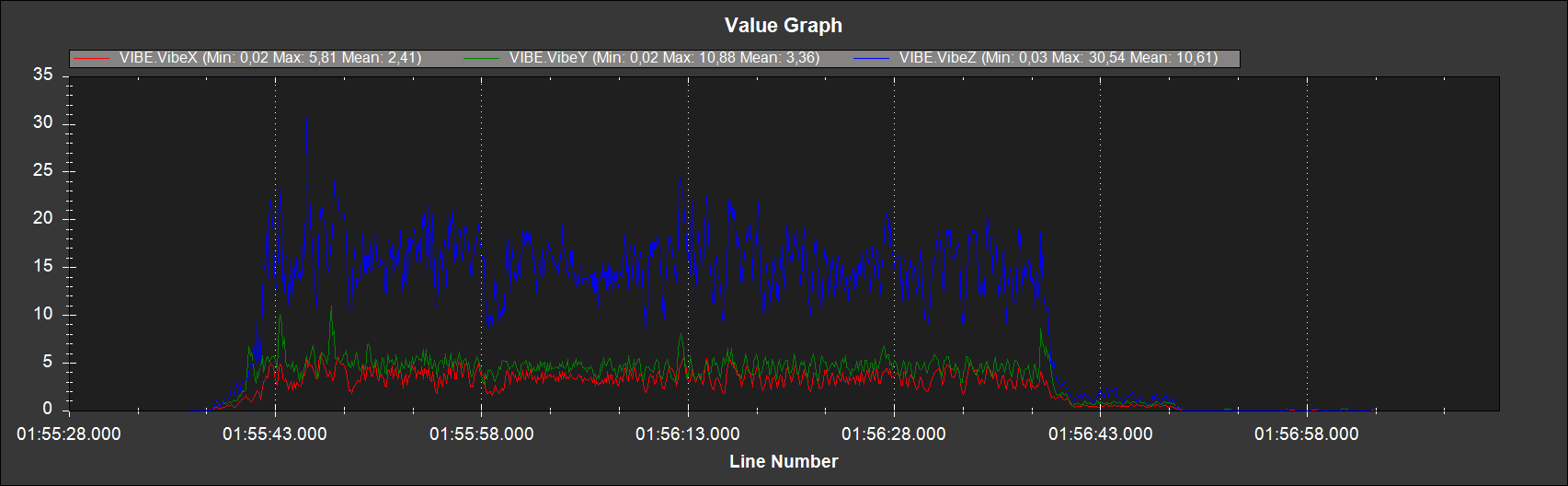
2 - Any suggestions regarding the issue with Z axis vib?
3 - Plastic frame, not a high quality frame, I will see if I can modify the frame to reduce the mot. arm deference.
4 - The compass issue is my biggest concern and probably going to be the most difficult to resolve. I will make some changes to the electrical distribution and see if I can eliminate some of the mag interference i.e. twist the bat. leads and use some shielding for the ESC to Mot. wires. If that does not resolve the noise issues then I guess an all in one ESC will be the next step.
You can put some washer under the motor to level them.
If you make changes in the electrical distribution and your compass doesn’t improve, try disabling that compass or perform a compassMot calibration Advanced Compass Setup — Copter documentation