Hello everyone,
As this is my first post, hello to everyone !
I’m about to start learning and building a TurboBeaver with Pixhawk 2.1 and Cube Orange ( with ADS-B Carrier Board ). As I’m in the planning phase right now, your input is highly appreciated to avoid unnecessary problems early on.
I want to begin with showing you what I’ve got so far and what I wanna build with :
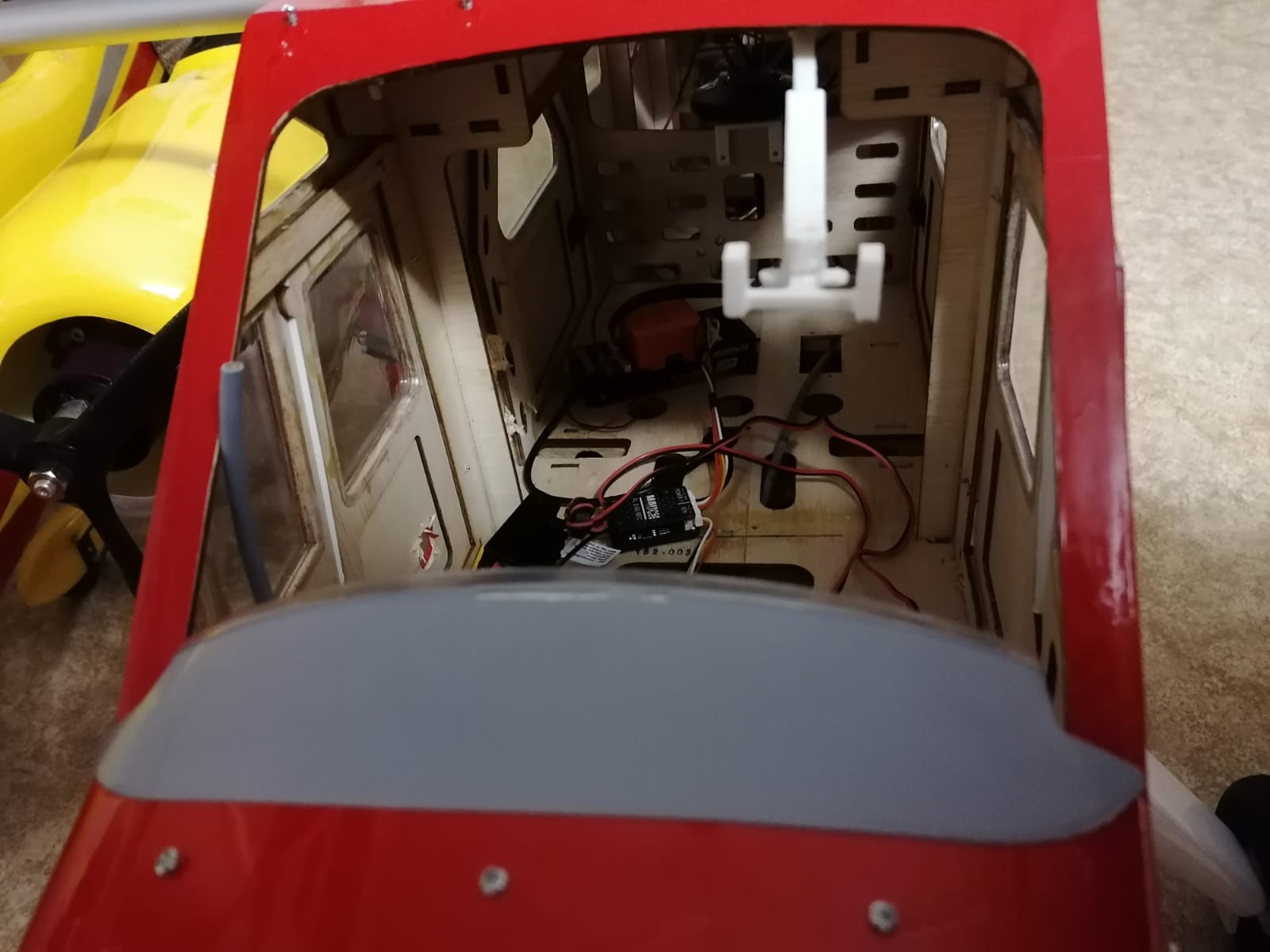
- Black Horse Turbo Beaver
- Pixhawk 2.1 / Cube Orange / ADS-B Carrier Board
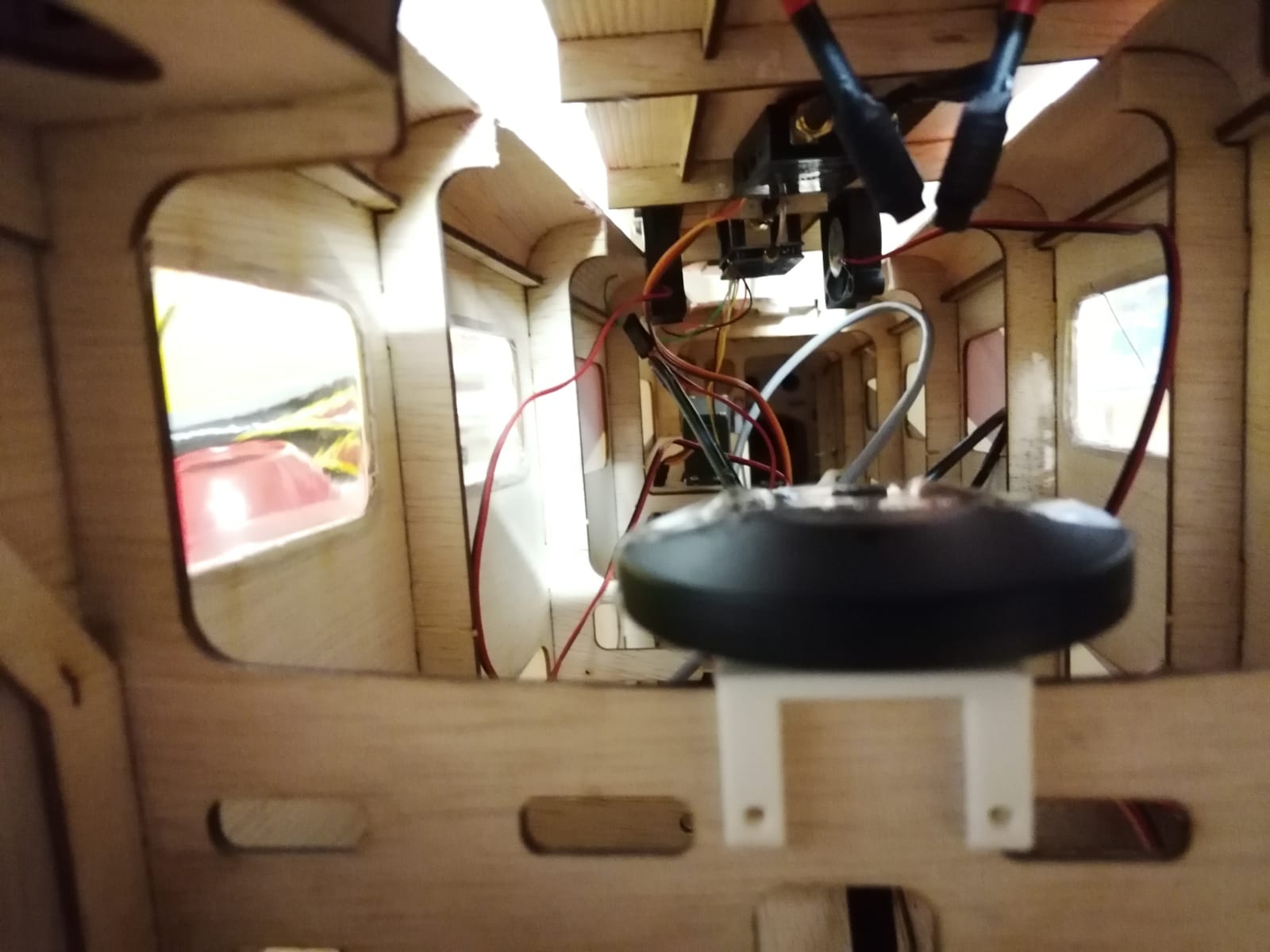
- Here 2 GNSS Module
- basic 6s drive train
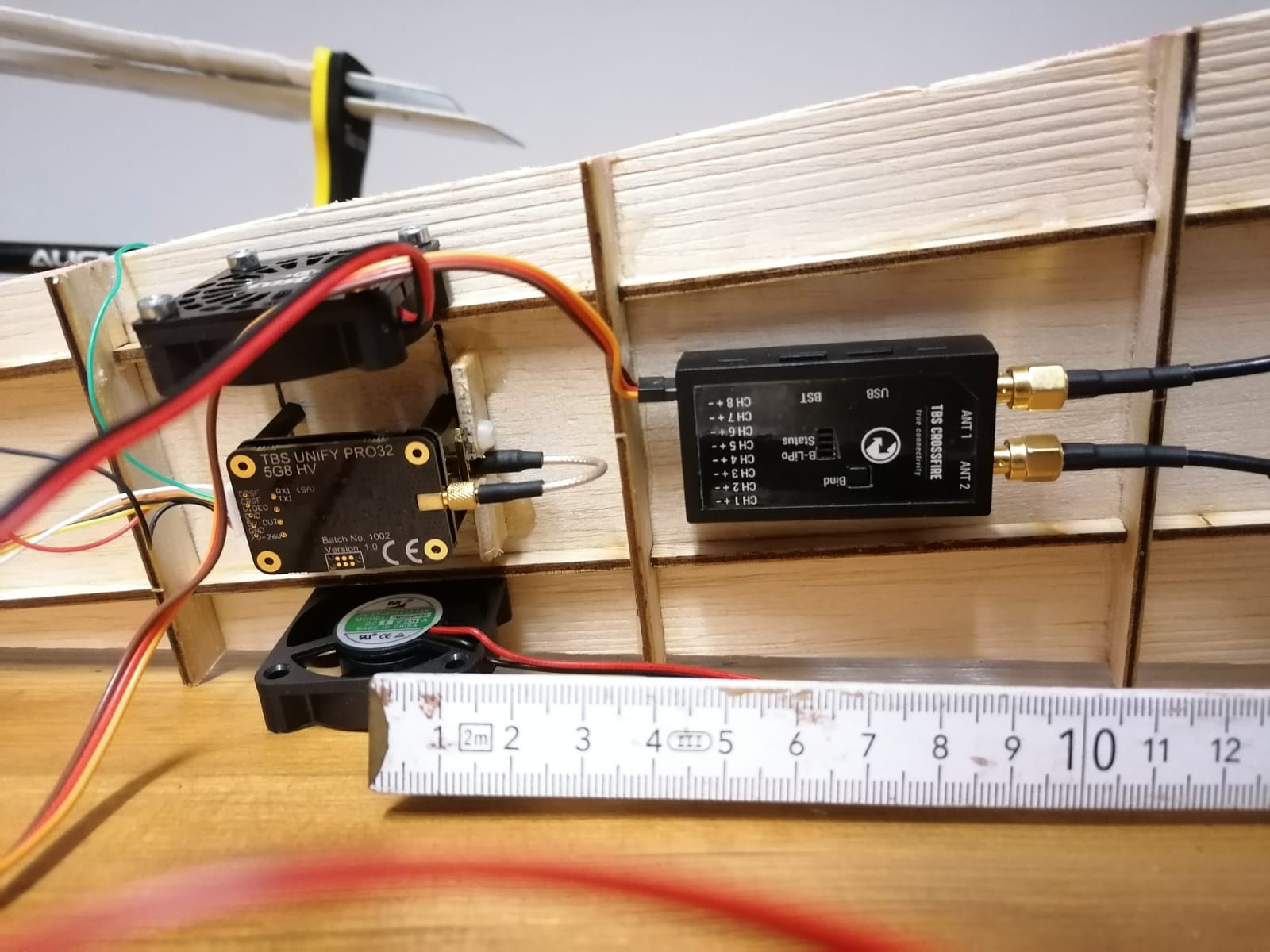
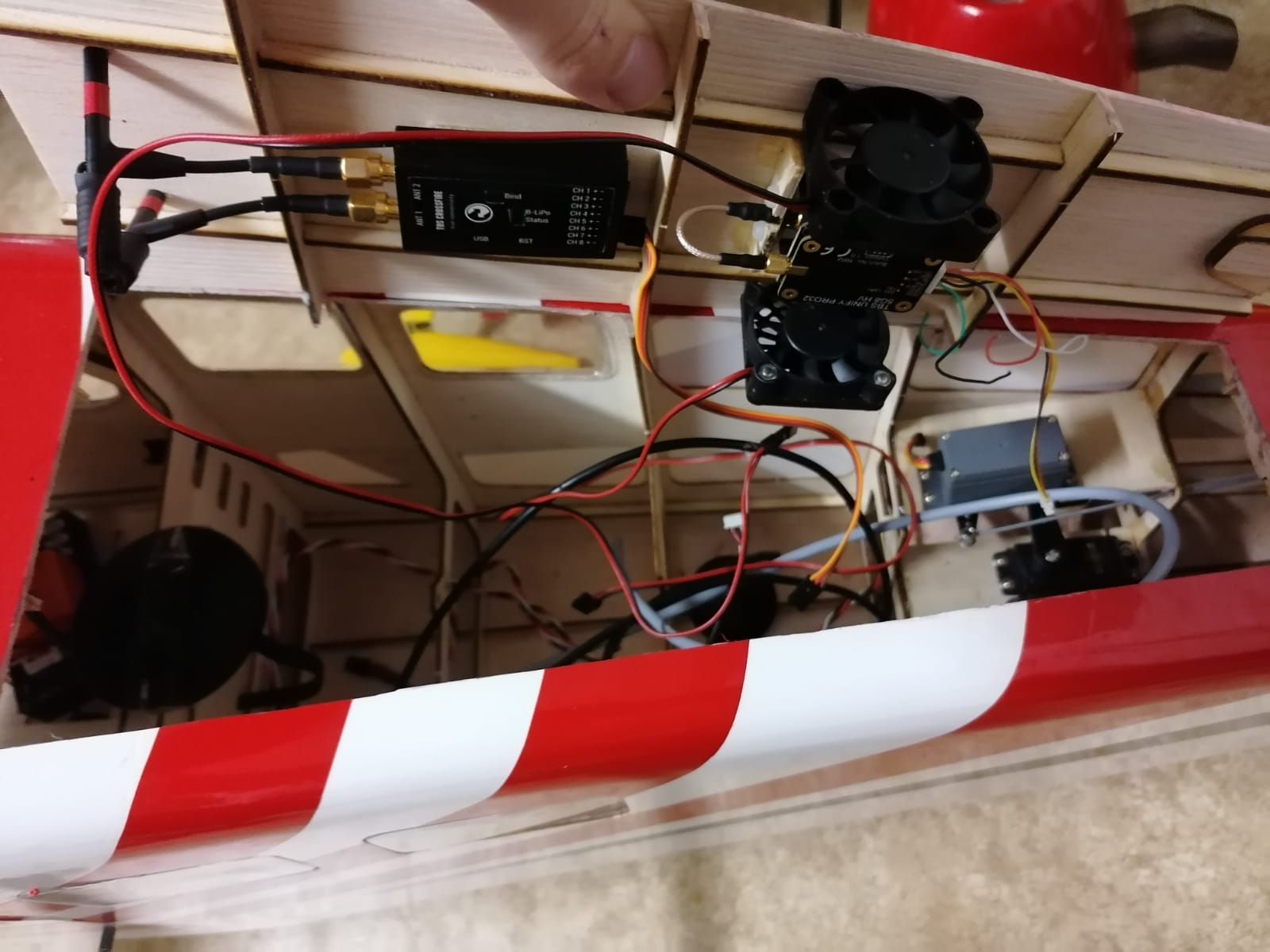
- TBS Core Pro FPV System (5.8 ghz, Blackpearl GroundStation, TBS59 Cam(s) )
- Not sure about the servos yet
- Spektrum DX9 tx
I’ve been reading a lot so far and watched many Painless360 videos on how to basic setup the flight controller. I hope this will get me started well, if theres something I should be aware of in addition to that, please let me know. I plan to have the flaps of the plane in a fixed position to save a radio channel. I use a Spektrum DX9 (unmodified) and will connect to the flight controller with the Spektrum Sat port.
My first goal is to just make the plane fly properly with the Flight Controller, utilize the auto trim and have everything going smooth and just working as expected.
Yet some questions are still bothering me right now, I hope you can answer them for me  :
:
-
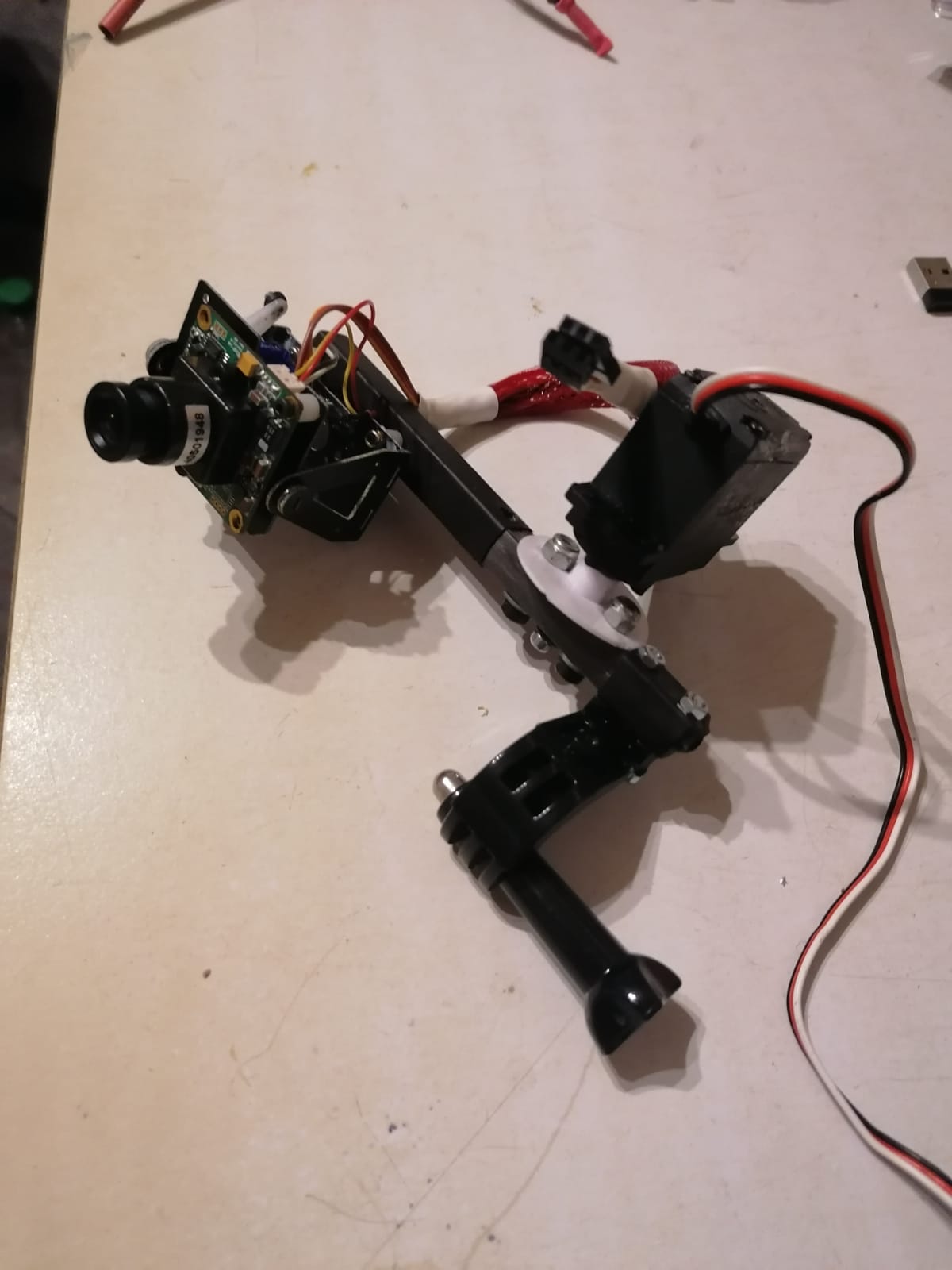
I want to have a FPV cam mounted below the plane next to a GoPro, so that I can see what I’m recording right now. These 2 cams should sit on a pan-tilt module, utilizing 2 servos. I want to control these 2 servos with the Rknob and the Lknob of the transmitter. Setting that up should be easy. Ideally, the plane should be in loiter mode, circling an object, while I just control the pan tilt so that I manually focus on whatever I want to record. I read that during the loiter, the flight controller is in auto mode and I cant control anything then. Can I set up the flight controller, so that the plane is in loiter and I can still manually control the pan tilt ?
-
As I fly Spektrum and can only connect via the Sat Port to the Pix, it is likely that during an Auto Mission in future the plane will fly out of range of the radio. Will the flight controller continue the mission or do something else ? How do I setup the failsafe in the radio, so that the mission wont end in a disaster ?
-
Im limited on channels to switch the flight mode, to get another channel free I can build the plane so that the flaps are fixed. Is it necessary to fly with 6 flight modes or can I just set them up to Manual, Loiter, Auto and it all will work fine ? If no, I´ll as mentioned just have the flaps fixed mechanically in neutral position.
-
The plane itself is very basic. 2ail, 2ele, 1 rud, 1motor, (2flp). The FPV System ist very easy to setup as well as its not connected to the flight controller. Where do you see major problems I may run into and how can I avoid them beforehand ?
-
This question is regarding the connection Ground Station/Flight Controller. Is it necesarry to have both connected at all times during the flight ? I read that there are telemetry modules, but can I simply load missions onto the flight controller and the plane will fly it even though its not connected to a ground station (laptop) on the flying field ?
-
Can I use basic analog servos ?
I hope everything until here makes sense, using a spacious platform and keeping things relatively basic for the moment. Please share what you think, I’m still a greenhorn when it comes to Pixhawk but I really want to learn using it ! I hope you experienced guys can answer my questions and assist me building the bird