That might do it - I can’t tell from the description.
That description suggests an action (or inaction) if a failsafe has already occurred. In my incident, I wanted a failsafe to be prevented during an action. (landing)
Maybe the option you mention would work - but as it’s hard to test, it would be nice to know for sure.
How did you do your test? I’m guessing it’s using the SITL. I just haven’t dug deep enough to figure out how to trigger a battery failsafe in SITL.
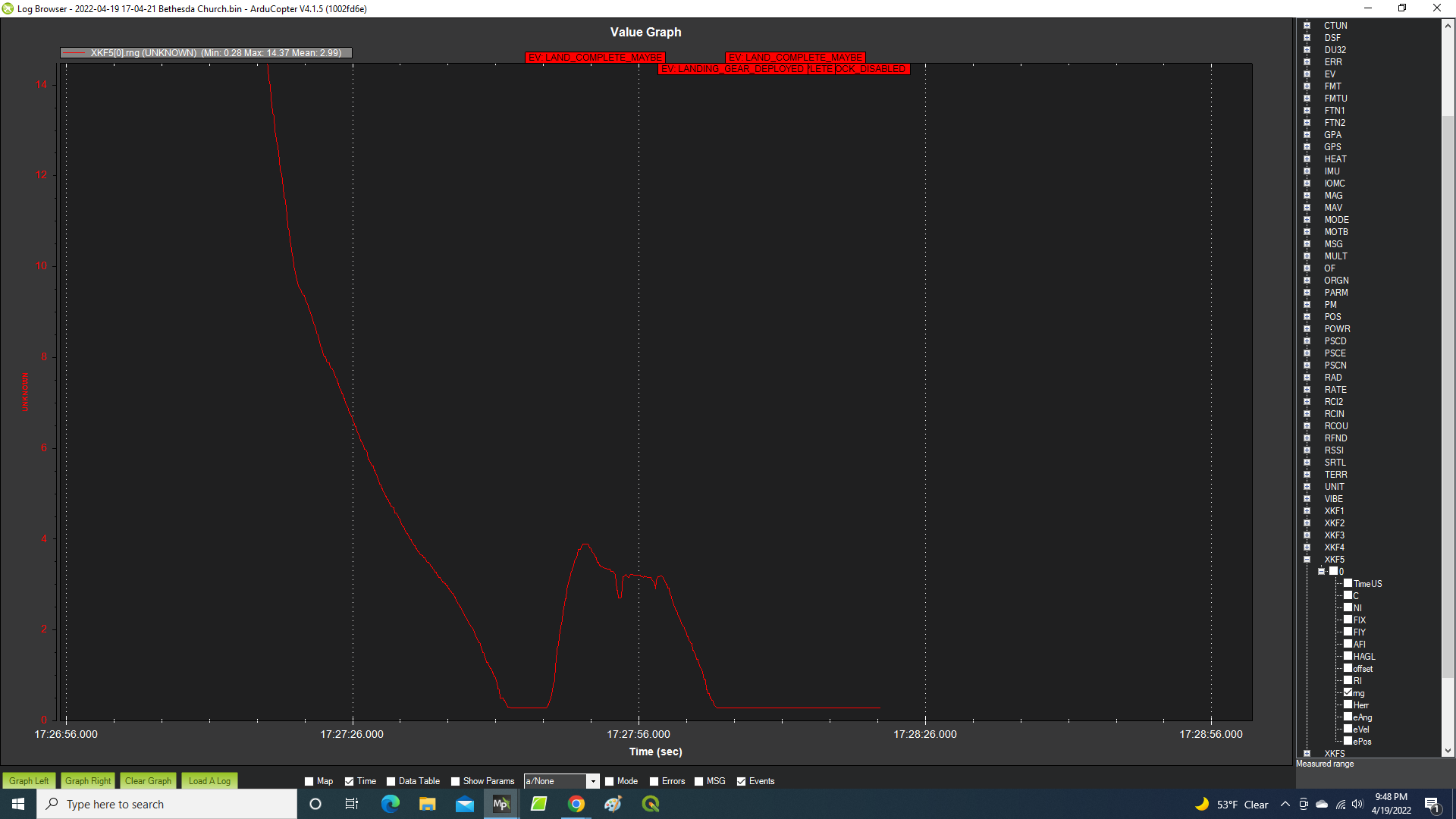
The only kinda weird thing was that the motors had stopped spinning after landing when the battery failsafe triggered. I don’t know how much time elapses between motor stop and disarm - but I thought that was a bit curious.
Right Joseph in SITL. Start with a SIM_BATT_VOLTAGE value of 12.5V (default I think) and set the Batt FS at 12.0V. Then run a simple mission with an RTL or Land as the last waypoint and make the WP down speed slow. Then as it’s descending and get’s to 15m or so quick switch over to the full parameter list and set and save 11.5V for SIM_BATT_VOLTAGE. You can switch this FS Option on and off and test to see how it works.