i checked everything such ESC calibration, twisted arms, physical balance, propellers balance and vocration damping
copter is not tuned yet but its completely stable with default PIDs
You didn’t say what ESc’s you are running.
I have had this with Shot running on PWM until I calibrated them a second and third time.
Most likely it is your tune.
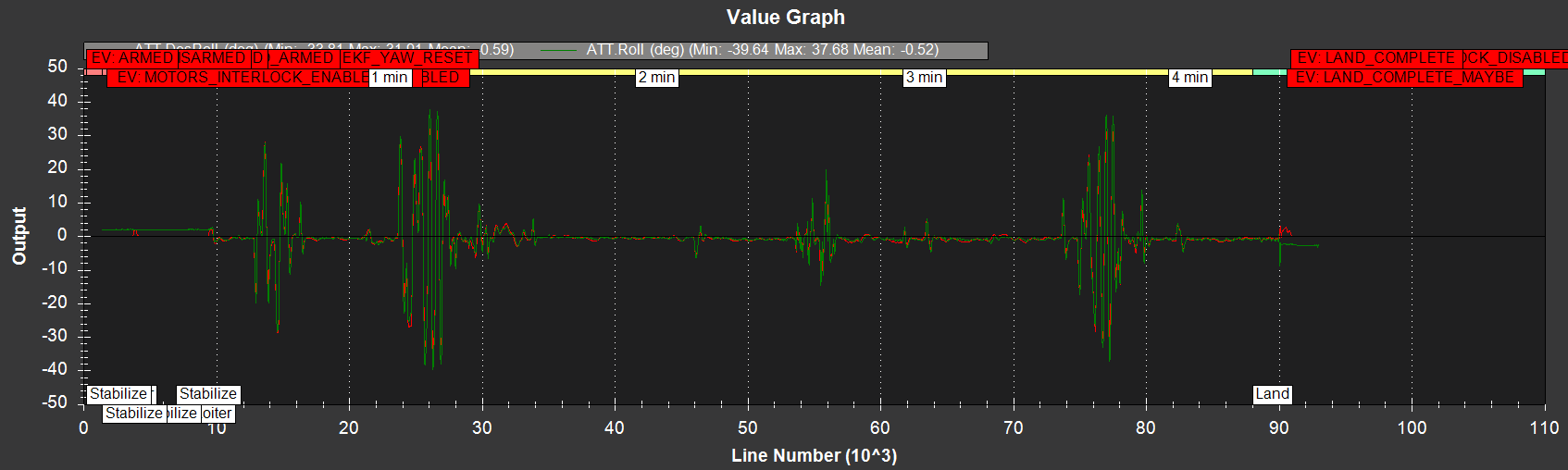
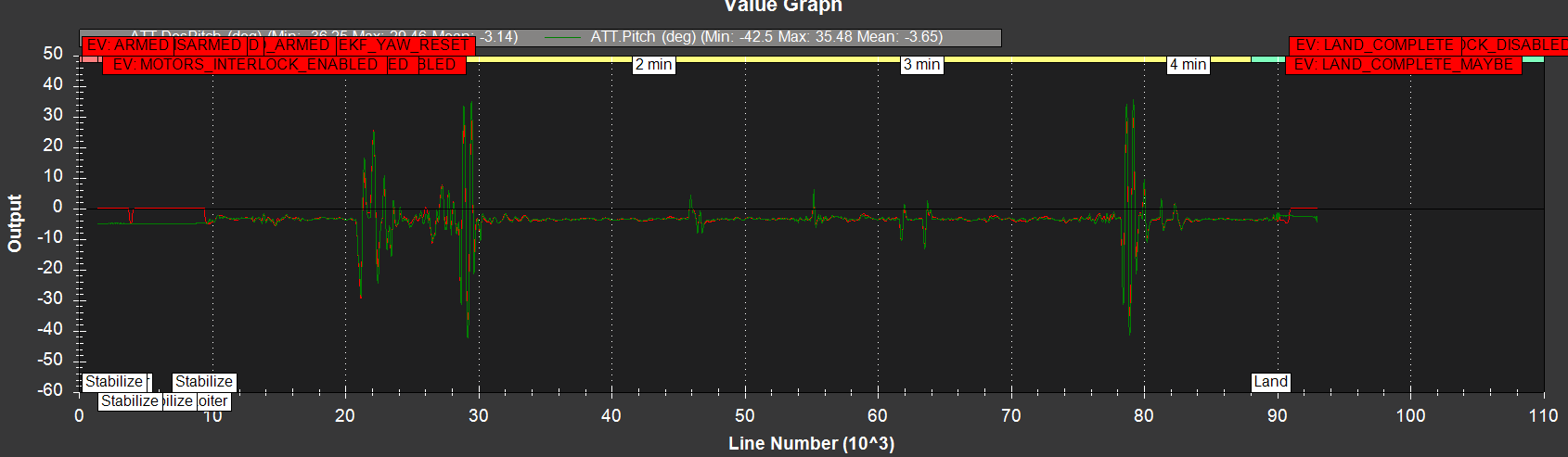
As you have not done an autotune yet, and you have plenty of power, it seems to be overworking to hold stability.
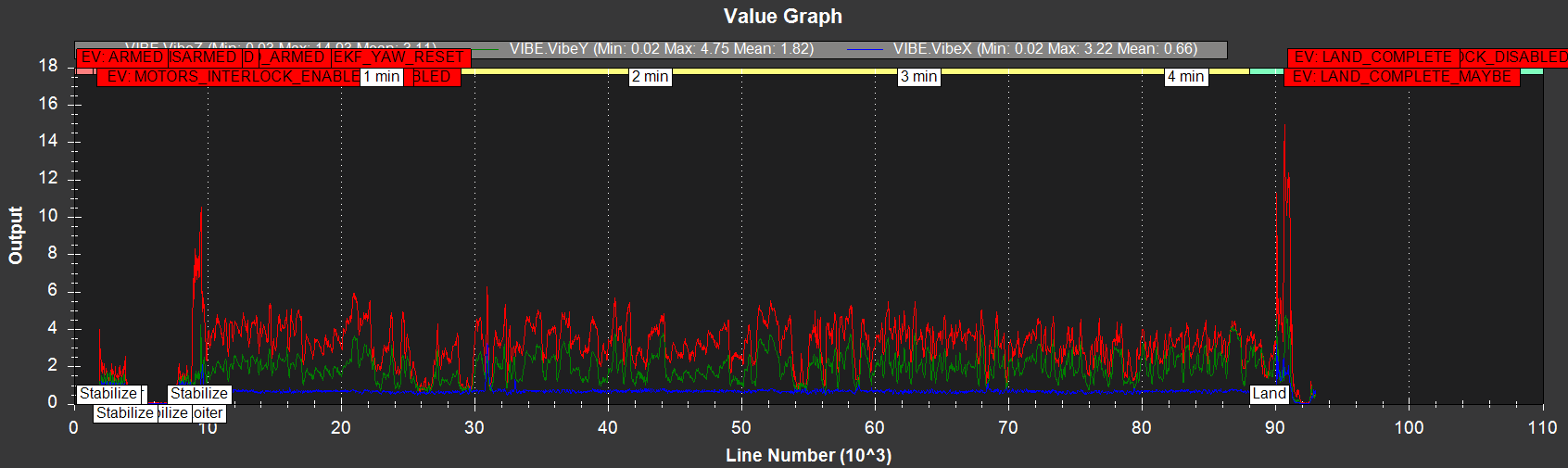
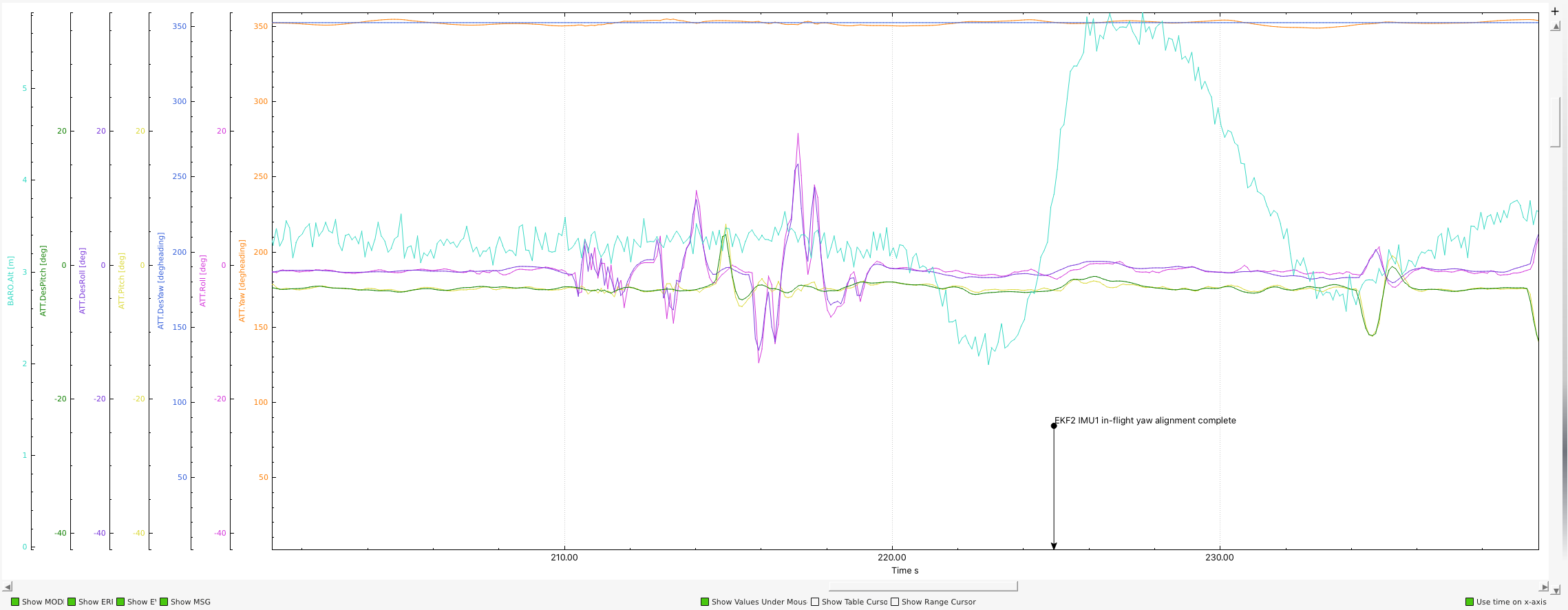
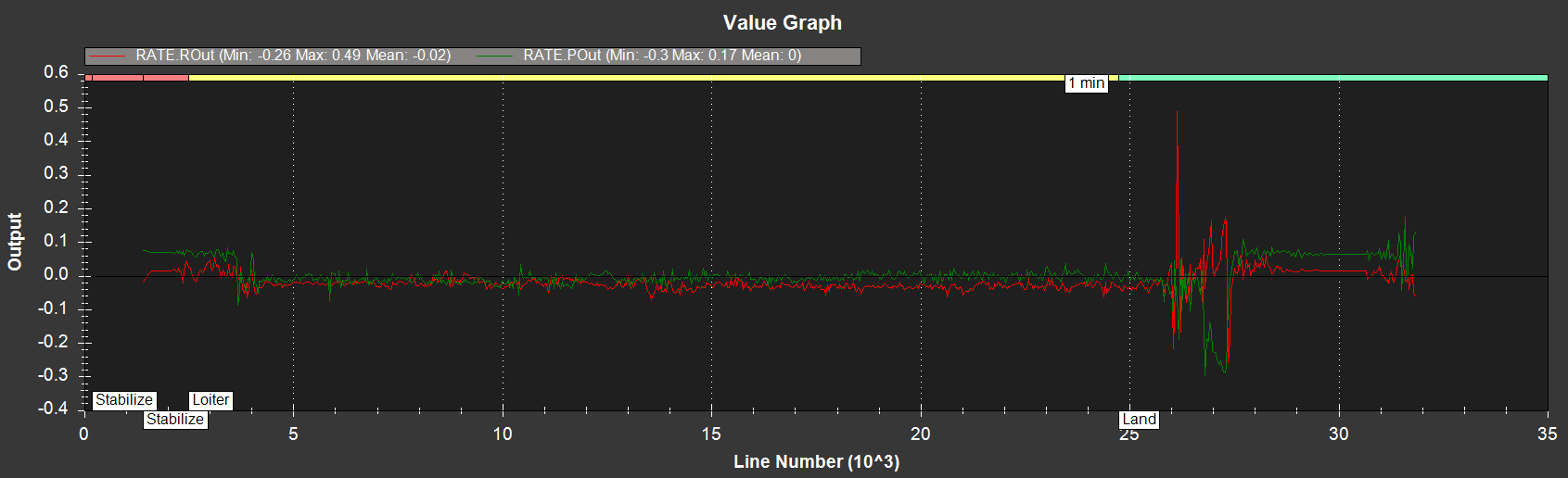
Looking at Des/Act you can see the fast overshoots in movement.
Try a soft autotune and tighten it up from there.
hi @mboland
i did autotune but every time it calculated low PIDs and unstable fight with new PIDs
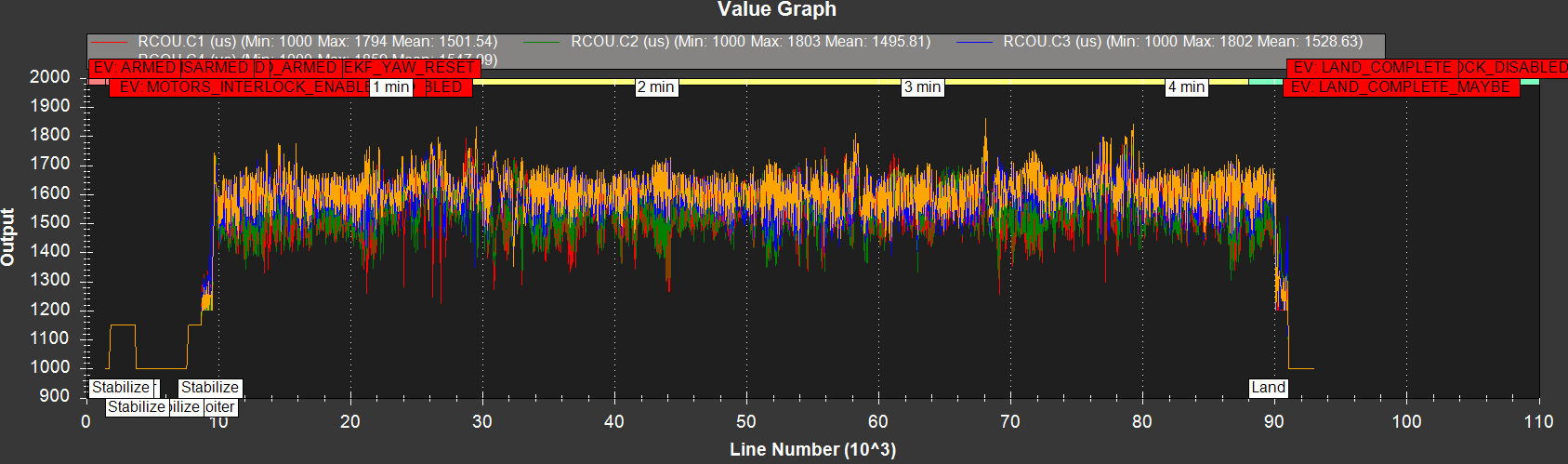
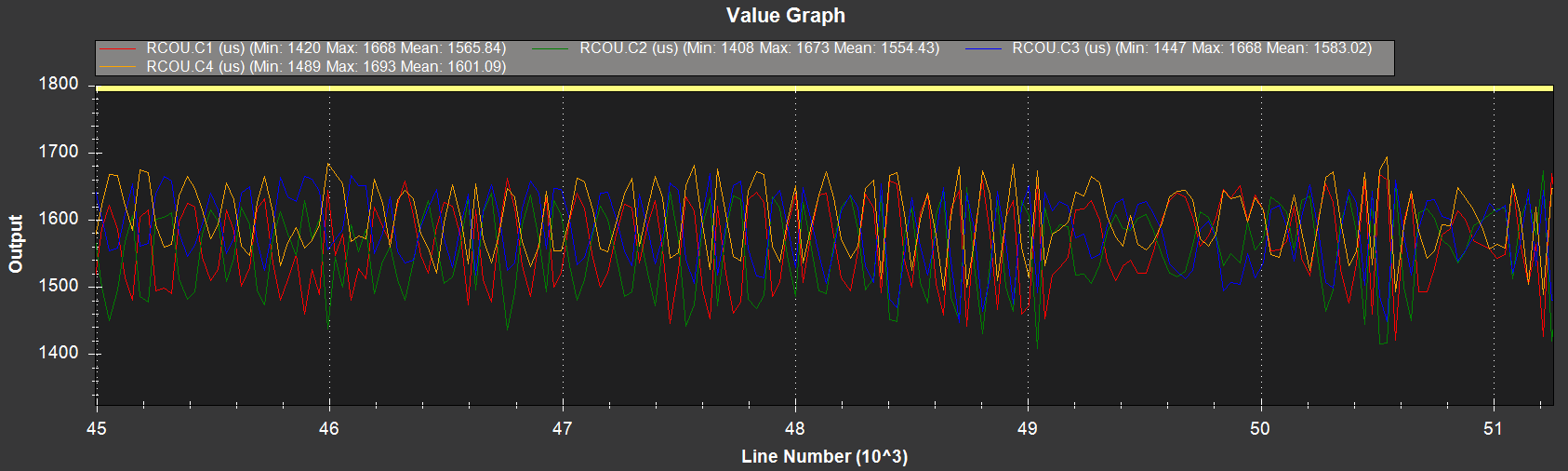
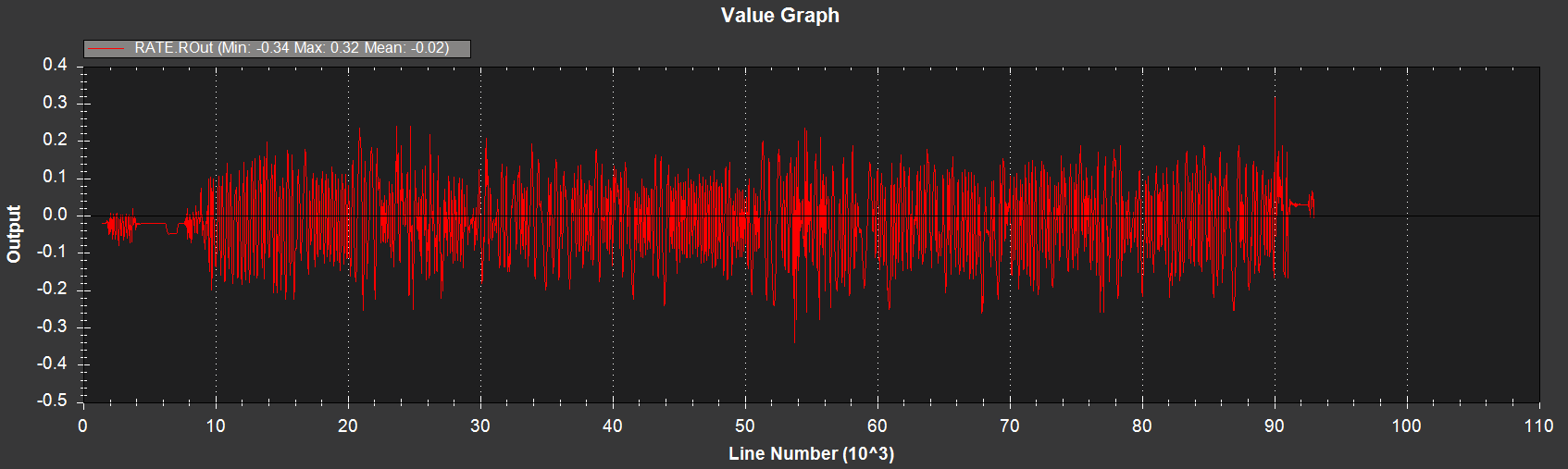
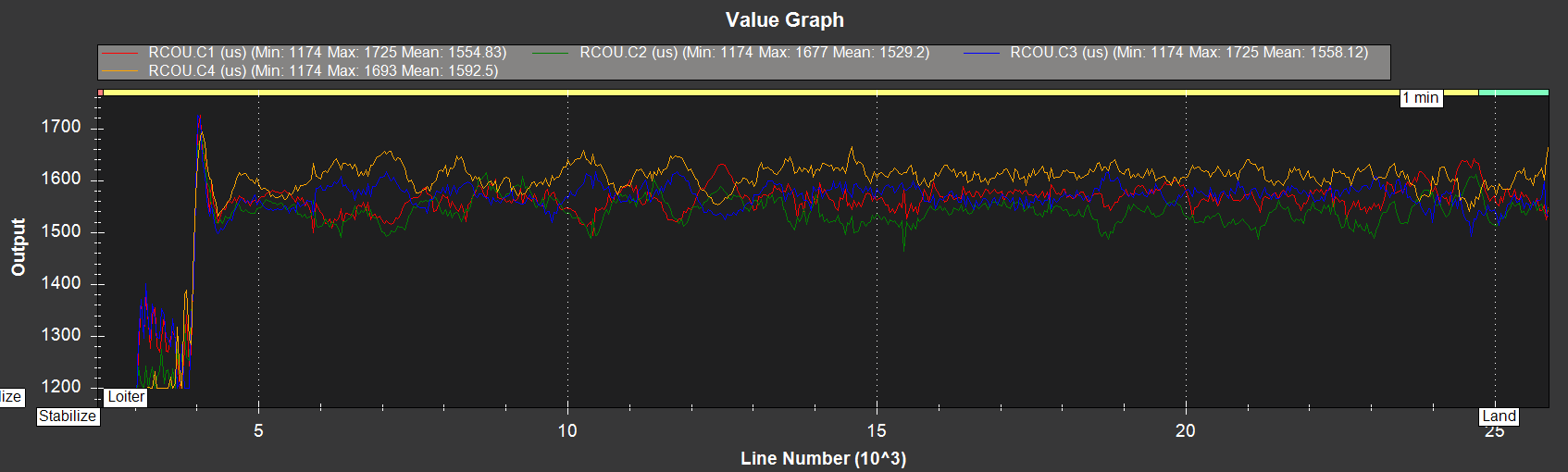
i revert them back to default PIDs then did harmonic notch filtering now RCOUTs are normal and there is no noise in RATE values
Hello Everyone
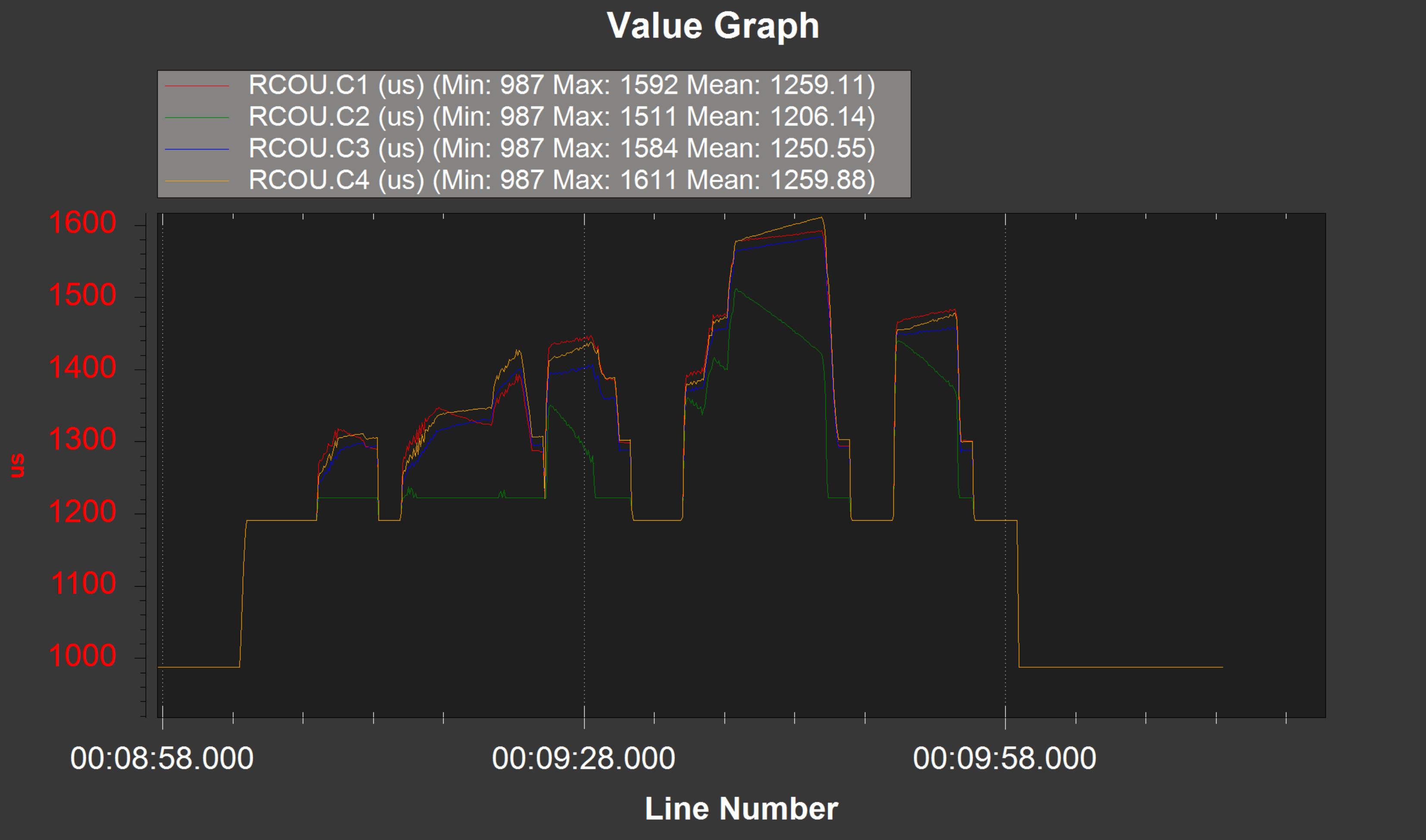
I am bench testing my quad and this topic was the closest thing to the problem I am facing. Motor 2 output is always lower than the rest , others have their differences but not as big as number 2. I switched the signal wires for motors and the problem is not from the ESC or motors. I calibrated the ESCs with mission planner calibrate all at once , several times but no luck. can anyone please help me. what can be the problem?
PS: I put spacers between controller and increased the distance between FC and PDB.
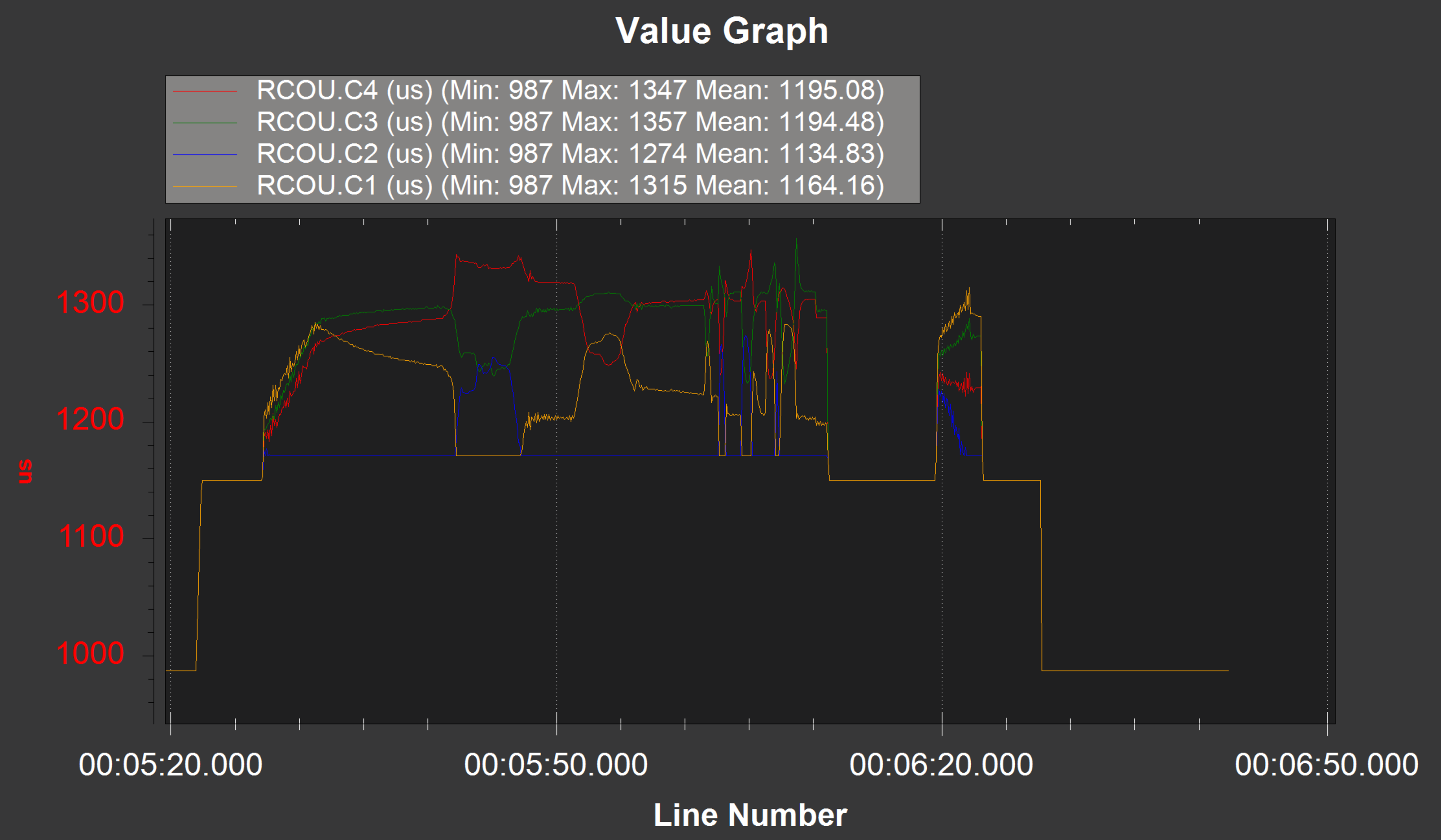
Now Motor 3 is the the one with the lowest signal output. (pic).
Could this be caused by the Magnetic interference? and if so , can this be solved with compass/motor calibration? any help is highly appreciated
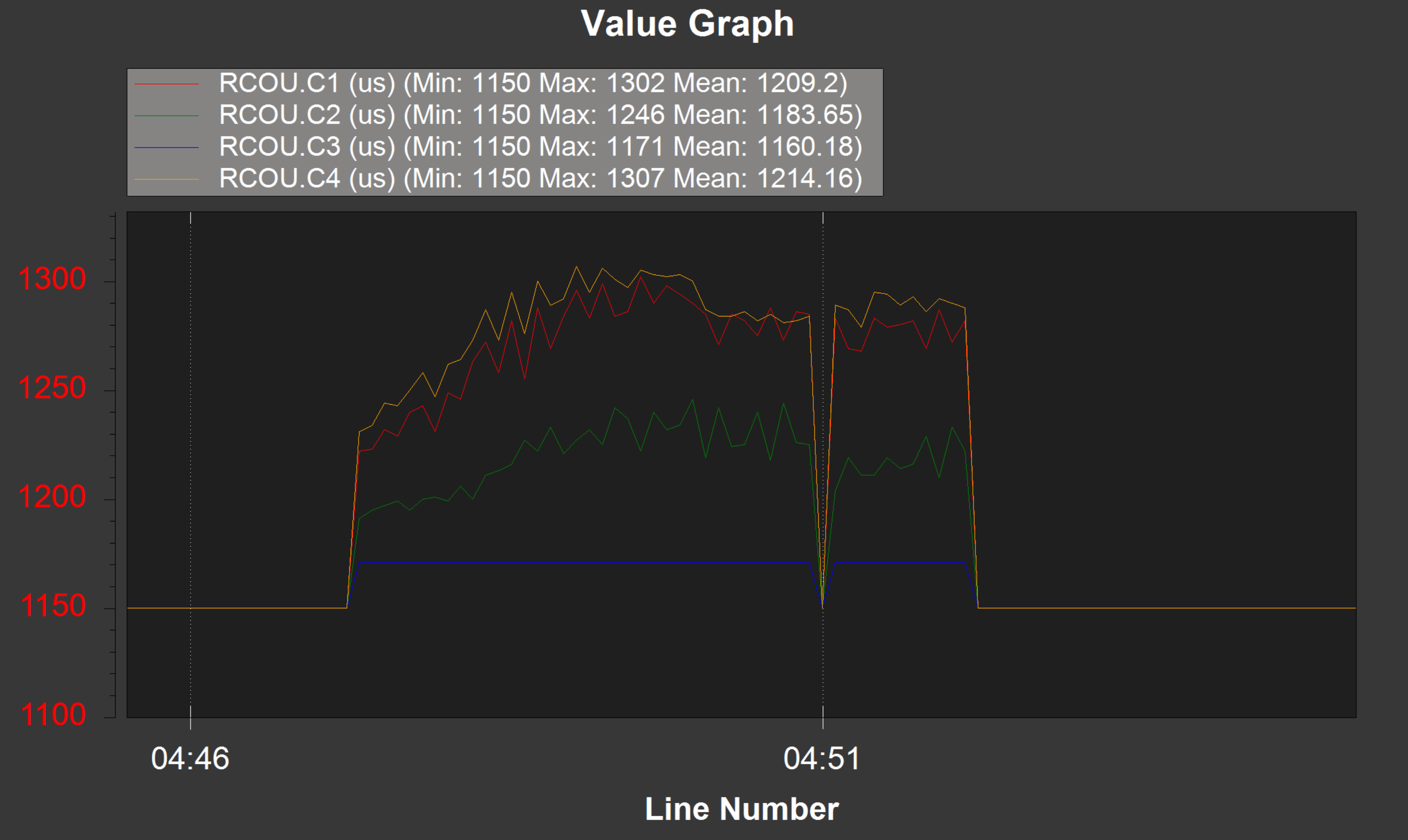
By bench testing, you mean arming it in stabilize with no props? If so, that behavior isn’t unusual. Instead, just use the motor test feature in mission planner… command each motor to the same throttle percentage and check that they’re spinning the same… there’s a minimum throttle percentage below which the motors won’t spin… should be the same for each motor.
@jeff567 Thank you very much for answering. yes , in stabilize mode with no props.
I also used motor test feature, visually they rotate with the same speed. But since I can’t read the RPM I’m not sure with how much precision.
Can you please give me your opinion on something else as well?
are signal wires prone to magnetic interference as well? I’m asking this because I put spacers between FC and PDB and tried the test again and now the lowest signal isn’t from motor 2 but motor 3.
It is a big Drone with 30 inch props and weighting around 20 kg, and twice crashed. so Every little detail I see I have to make sure it’s not a problem.
yeah, I know you can’t necessarily read the RPM or PWM signal during the motor test, but at the very least I like to confirm that the minimum throttle needed to spin the motor is the same for all motors (within 1%).
I’m sure like any other signal wire ESC wires are susceptible to magnetic interference, I’ve never experienced it though.