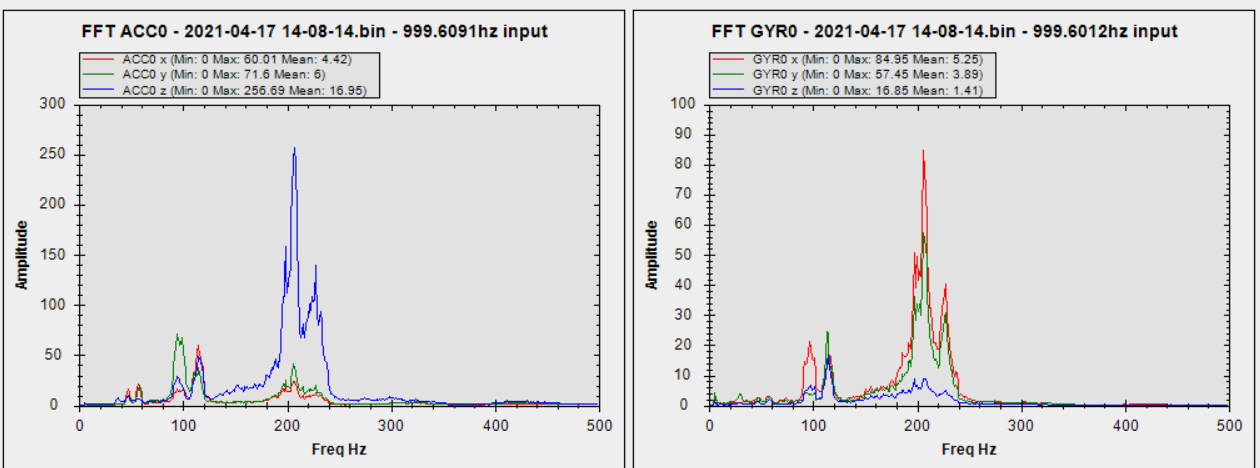
Z vibrations are getting too bad and there’s definitely lots of clipping - no doubt that will be a contributor.
Definitely fix the vibrations before flying again.
Autotune came back with some really low PIDs for both RAT and ANG. that will mostly be because of the vibrations I think.
I would put back the previous values, since it worked OK.
ATC_ANG_RLL_P,4.5
ATC_ANG_PIT_P,4.5
ATC_ANG_YAW_P,4.5
ATC_RAT_RLL_P,0.13500000536441803
ATC_RAT_RLL_I,0.13500000536441803
ATC_RAT_RLL_D,0.003599999938160181
ATC_RAT_PIT_P,0.13500000536441803
ATC_RAT_PIT_I,0.13500000536441803
ATC_RAT_PIT_D,0.003599999938160181
ATC_RAT_YAW_P,0.18000000715255737
ATC_RAT_YAW_I,0.017999999225139618
Test fly with this change too:
INS_GYRO_FILTER,26
Just see if it will launch and is reasonably stable. If it’s not the same as before you can set INS_GYRO_FILTER,20 and make it 26 after the harmonic notch filter and retest.
If it’s flying OK, set up the Harmonic Notch filtering before running Autotune again. Read up on how to do that, or just do each “phase” and link to the .bin file and we’ll take a look.
HNOTCH phase 1
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
- ALTHOLD hover test for more than 1 minute, check FFT
HNOTCH phase 2
INS_HNTCH_ENABLE,1 <- set then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,{hover_thrust}
INS_HNTCH_FREQ,{peak freq from FFT}
INS_HNTCH_BW,{peak_freq / 2}
INS_HNTCH_ATT,40
INS_LOG_BAT_OPT,2
- hover & dynamic test, check FFT results, adjust FREQ and BW if needed, retest
HNOTCH phase 3
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
- no extra logging, assumes HNOTCH is working great
EDIT for a bit more clarity (maybe)