ok now tuning all axis has been finished and i did a fly in loiter and stabilize in a clam day
first i want to say thank you for a great tuning instruction my hexacopter fly well in stabilize without any problem
but i still have shaking problem in loiter
here is log file
what is your idea ?
Ok, start with dropping these paramters:
ATC_RAT_YAW_P 0.5
ATC_RAT_YAW_I 0.05
ATC_ANG_RLL_P 8
ATC_ANG_PIT_P 8
ATC_ACCEL_R_MAX 50000
ATC_ACCEL_P_MAX 50000
ATC_ACCEL_Y_MAX 10000
See how that goes.
Basically I have backed your tune off a little to see if it is the angle loop or the rate loop causing the problems.
1 Like
@Leonardthall
ok with these setting shaking reduced by 80%
this flight is much longer and there is data of loiter and stabilize in the log file
log file
now i have to reduce suggested parameters to get the best result ?
ATC_ANG_PIT_P 5
ATC_ANG_RLL_P 5
ATC_ANG_YAW_P 3
ATC_INPUT_TC 0.25
ATC_RAT_PIT_D 0.007
ATC_RAT_PIT_I 0.21
ATC_RAT_PIT_P 0.21
ATC_RAT_RLL_D 0.0055
ATC_RAT_RLL_I 0.165
ATC_RAT_RLL_P 0.165
ATC_RAT_YAW_FILT 2
ATC_RAT_YAW_I 0.05
ATC_RAT_YAW_IMAX 0.5
ATC_RAT_YAW_P 0.5
Try this. I have backed off the rate parameters to see if this settles things down. I am looking for the loaded gun.
hi @Leonardthall
with these values copter now is very sluggish and little bit hard to control
log file
what is the next step
thanks
do you see the shaking problem?
I just realised that you have not set your MOT parameters.
You need to do a proper tune to start out with.
I even linked you to the instructions here.
I am disappointed that I wasted so much time trying to work out what was wrong when you had not taken the time to listen to my advice and read the instructions in the first place.
hi @Leonardthall
really sorry about wasting your time but i was seted these values
Battery setting
Parameters used to linearise your motor thrust curve.
- MOT_BAT_VOLT_MAX - 4.2v x No. Cells
- MOT_BAT_VOLT_MIN - 3.3v x No. Cells
- MOT_THST_EXPO - 0.55 for 5 inch props, 0.65 for 10 inch props, 0.75 for 20 inch props. This parameter should be derived by thrust stand measurements for best results (don’t trust manufacturer data).
Motors setup
Parameters used to define the output range sent to the ESC.
- MOT_PWM_MAX - Check ESC manual for fixed range or 2000us
- MOT_PWM_MIN - Check ESC manual for fixed range or 1000us
- MOT_SPIN_ARM - use the motor test feature Checking the motor numbering with the Mission Planner Motor test
- MOT_SPIN_MAX - 0.95
- MOT_SPIN_MIN - use the motor test feature Checking the motor numbering with the Mission Planner Motor test
- MOT_THST_HOVER - 0.25 or below the expected hover thrust percentage (low is safe)
i was left MOT_PWM_MAX and MOT_PWM_MIN to zero because i mixed 2 different ESC and calibrated theme to my ch3 input
and completely forgot these values :
PID Controller Initial Setup
- INS_ACCEL_FILTER - 10Hz to 20Hz
- INS_GYRO_FILTER - 80Hz for 5 inch props, 40Hz for 10 inch props, 20Hz for 20 inch props
- ATC_RAT_PIT_FILT - INS_GYRO_FILTER / 2
- ATC_RAT_RLL_FILT - INS_GYRO_FILTER / 2
- ATC_RAT_YAW_FILT - 2
- ATC_ACCEL_P_MAX - 110000 for 10 inch props, 50000 for 20 inch props, 20000 for 30 inch props
- ATC_ACCEL_R_MAX - 110000 for 10 inch props, 50000 for 20 inch props, 20000 for 30 inch props
- ATC_ACCEL_Y_MAX - 27000 for 10 inch props, 18000 for 20 inch props, 9000 for 30 inch props
- ACRO_YAW_P - 0.5 x ATC_ACCEL_Y_MAX / 4500
now i changed them
@Leonardthall
ok now i finished tuning and auto tune
copter is flying well at stabilize and i have no any shaking problem at all in this mode so i didnt change input shaping parameters
but it seems that still i have shaking problem on forward move with loiter when i apply small (5 to 10 degrees) control input into roll , with bigger degrees i have no problem
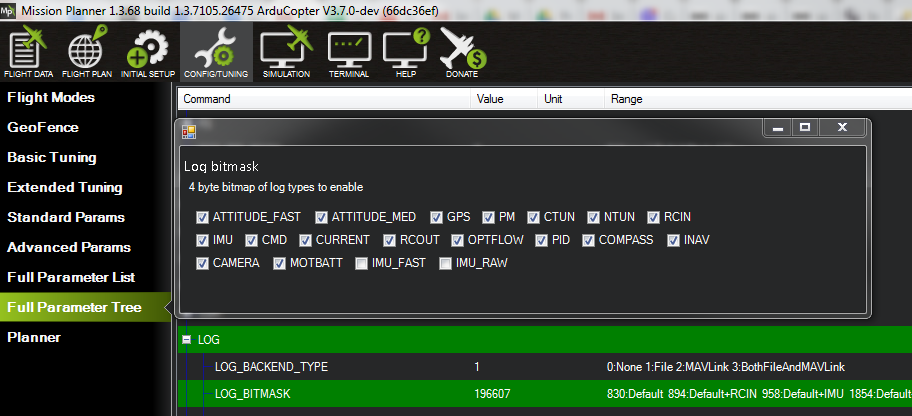
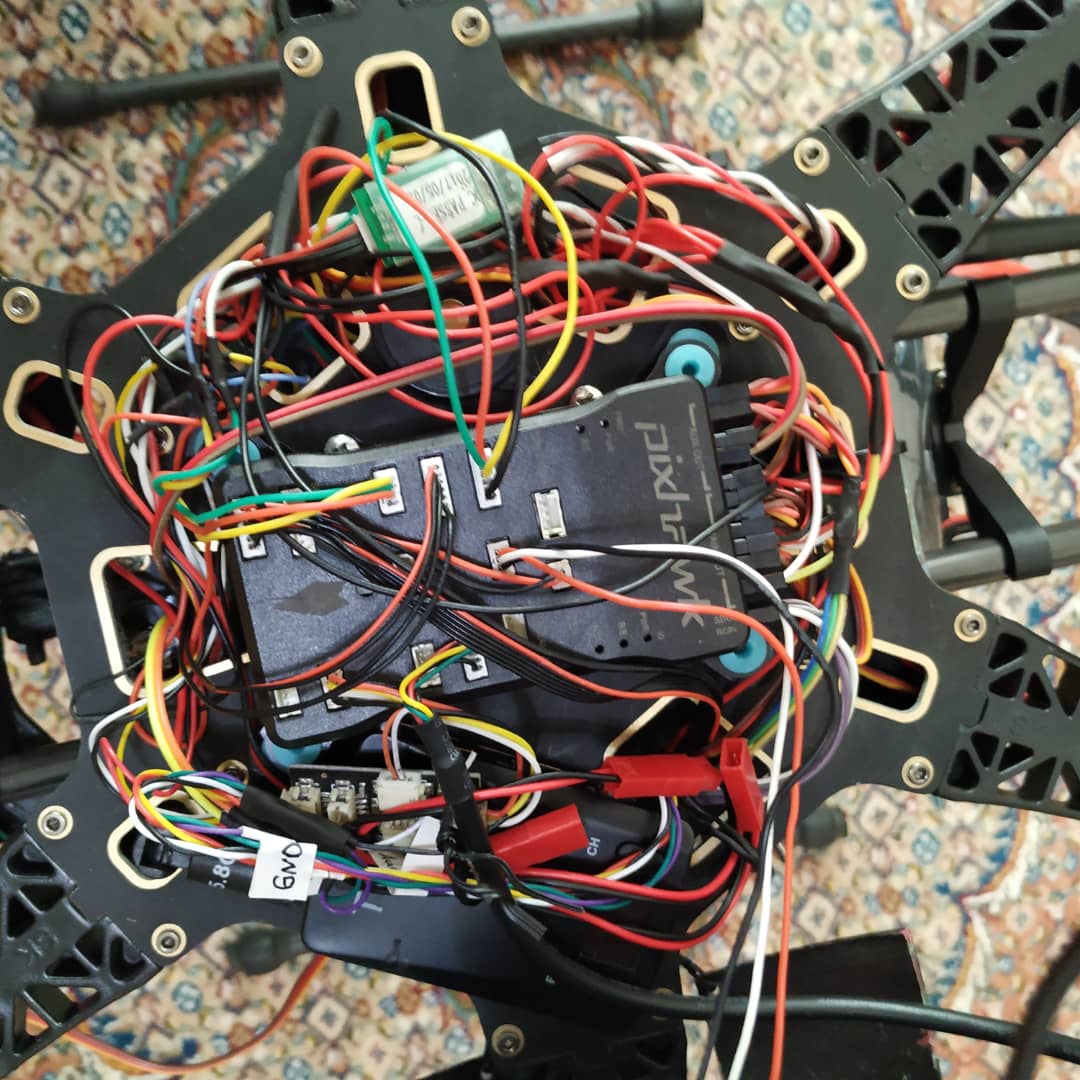
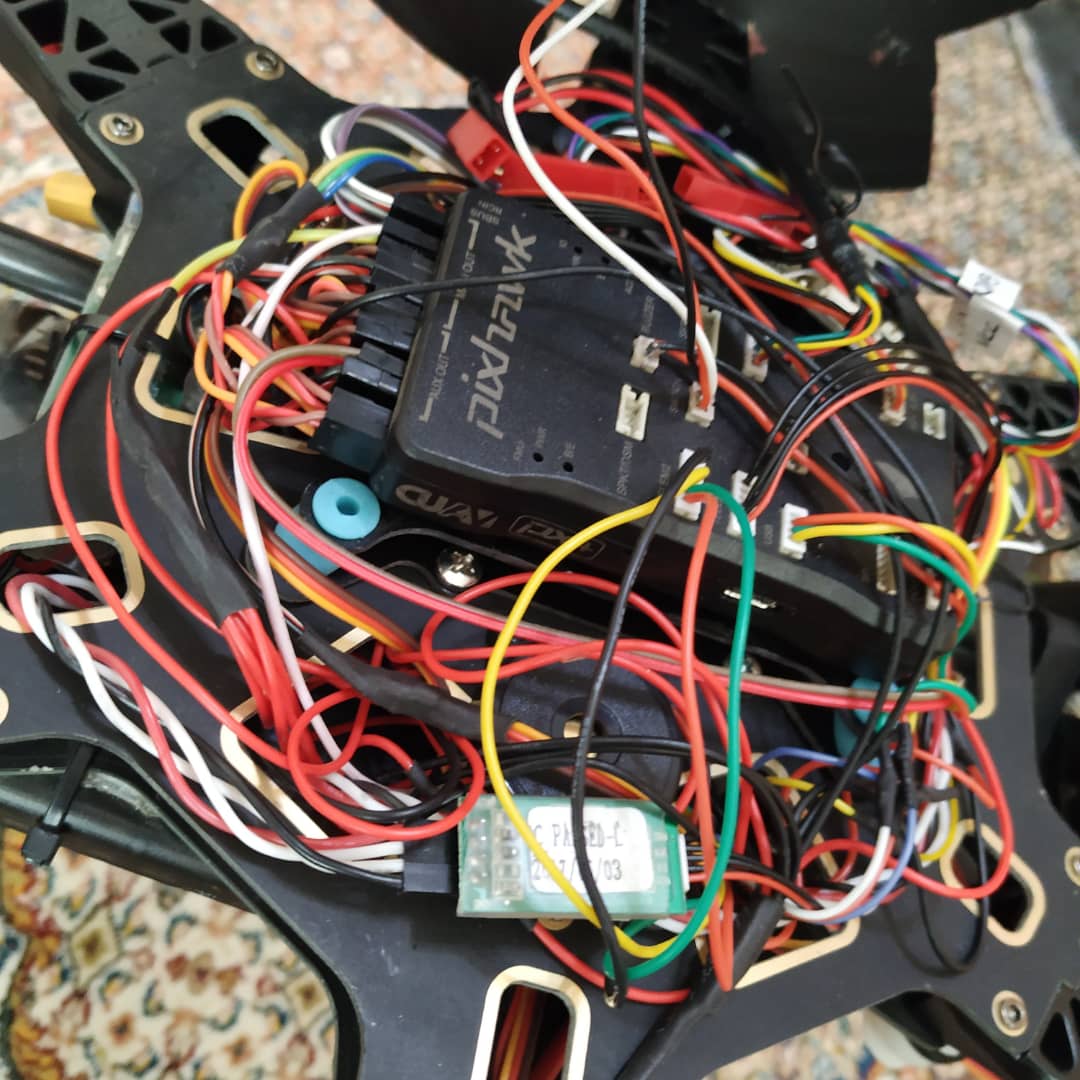
Can you please provide photos of your aircraft and close ups of the autopilot mount.
Have you autotuned it again with these settings?


Ok, that might explain a few things. Those plastic arms have always been an issue because they are quite flexible.
I see you put up a post on the open discuss. I will reply quickly there.
thank you so much for responsibility and great supporting
I did overcome that problem with the flexible plastic arms.
Had never build a drone. I fly Helicopters for years. But used a cheap Hobbyking Quad (pixracer) to test out my missions only.
For some reason I wanted to try it with a bigger one and purchased a cheap Hexacopter kit from Banggood with some ideas in my head.
The other day I put a post up about my first fly and Auto tuning.
I wanted to show you how I made those arms stiff. All 6 arms have a carbon rod in the center. Using blue heat shrink for batteries I put two times a heat shrink around each arm. Carefully with a hairdryer each heat shrink layer was shrunk to what you see on the photos. Using all stickers I could find to take the ugliness out of the heat shrink look, I believe.
BTW, that sticker on the top is the company who made my lenses for my new SKYZONE 02x Goggles.
My old eyes see through the Goggles as clear as on my 4K Sony TV now.
I flew that Hexa copter (total of 4kg- 2X 8000mAh 4s parallel underneath) in pretty windy conditions last Sunday and must say that first attempt Autotune and the result is very very good.
I hated drone sound in the past.That was the main reason for not using them. But this Hexacopter GOPRO 7 black underneath I love it to bits. The 3 blade props are very quiet. All is good for me regarding plastic arms.


2 Likes
thanks for sharing your experience
could you please give me more about your setup like motors, ESCs …
ESC = HOBBYWING Platinum-30A-OPTO
MOTOR = SunnySky x3108S 900 KV