Well, it just fell down 9 meters suddenly in autotune, log auto analysis is a mess but I’m curious and can’t see anything by myself on logs.
Uploaded precrash flight and postcrash arm check also.
Quad tarot 650, pixhawk 2.
https://drive.google.com/open?id=1OOnMoWNC-6JkZ40p4hLsqh4uhGnjjLpV
Pretty clear; Motor3 stopped mid air, either desync or other electrical./mechanical failure.
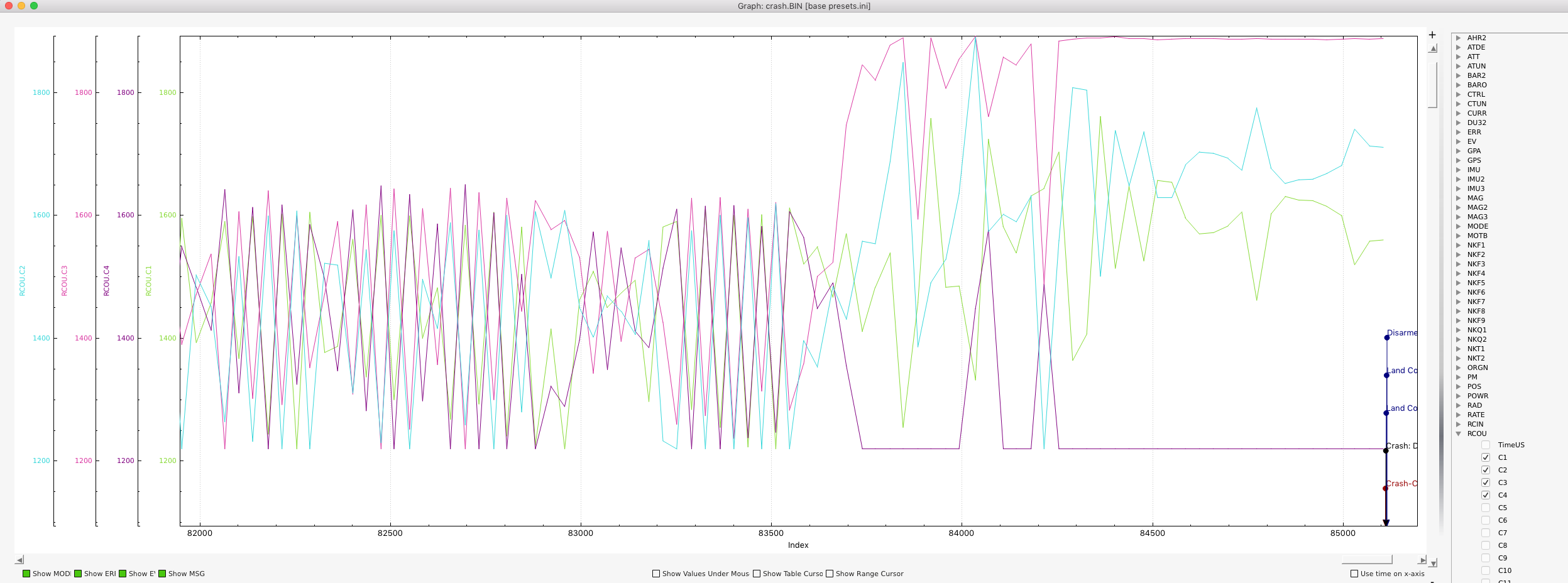
Check RCOUT3 and RCOUT4 at the moment when ROLL and PITCH started to differ from DesRoll and DesPitch. RCOU3 goes up and RCOU4 goes down, they are opposite each other.
Many thanks.
Yes, it “landed” on motor 3 arm, but can’t see on the graphic it was motor 3
All RCOUT seem same behaviour
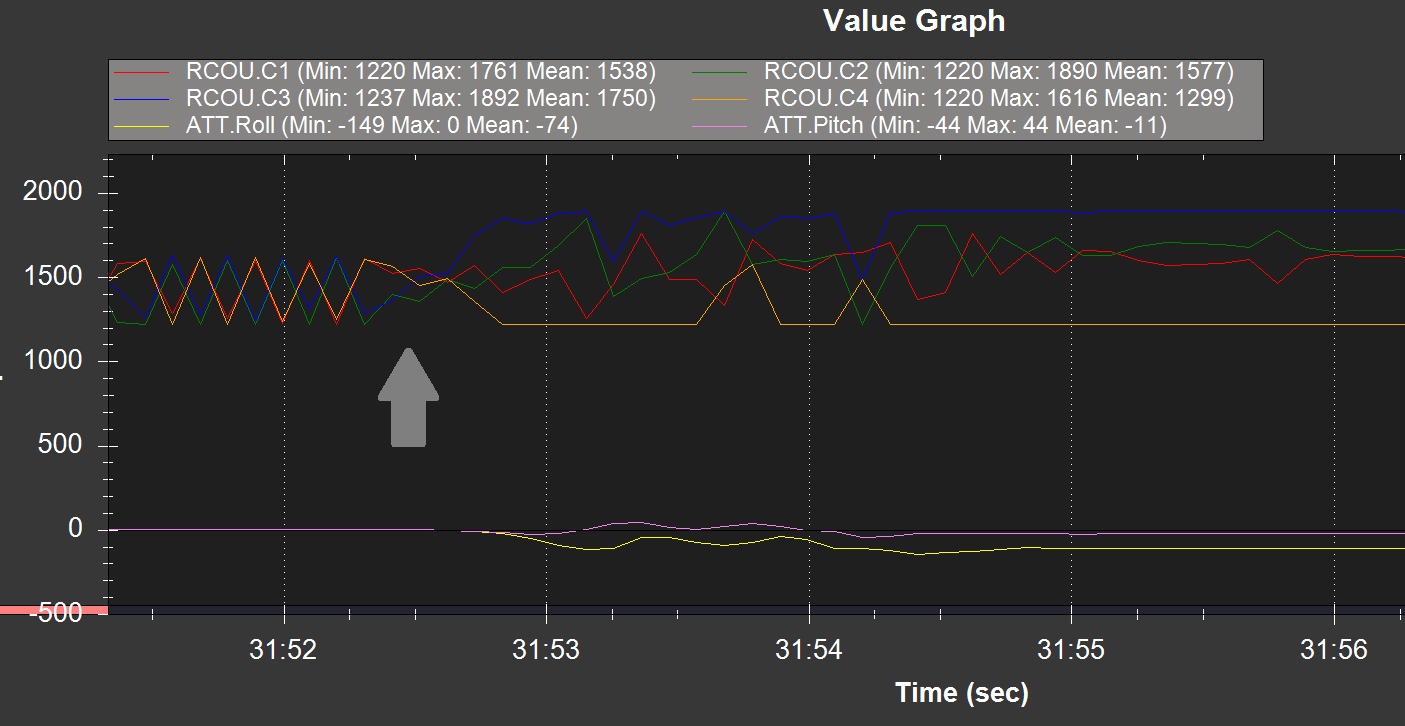
Just a moment later, look at the blue and the orange lines. Right where roll and pitch starts to dip…
But how you know blue line means the motor 3 is stopped or something happened to him and not the others… I’m sorry, I can’t see the obvious here.
The thing is even with a broken arm (motor 3), all motors were running after the crash.
Because the controller has set that motor to maximum to try and get lift from it, and reduced it’s opposite number to zero to try and keep the copter stable.
It’s a common scenario.
Got it, thanks.
It is possible to add an exponent 10^n or 10^-n to some values, I mean in this pic adding 10^-2 on RCOUT help to unify the graphic.
Try APM Planner it has better graph interface than MP…