Hello MagicRuB,
Thank you very much for your response, I greatly appreciate your help and all the suggestions.
It seems I messed up with some of the parameters, in my defense I would say that I was trying to avoid previous crashes that, at the end, seem to be related with the integrator reset bug in previous versions.
1 First waypoint is not always TAKEOFF, sometimes it’s WAYPOINT.
All the missions I’ve uploaded start with a TAKEOFF (15 meters, 15deg), today, I have re-load all of files and checked that, and they always start with TAKEOFF. Would it be possible that it is changed somehow upon upload to pixhawk? I have done three more flights today with the same auto missions, takeoff was always the first item.
While executing a WAYPOINT mission item in AUTO mode, throttle is handled by the autopilot so it will think it’s stalled and give full throttle (or trigger a crash if CRASH_DETECT=1 which it’s not). Use TAKEOFF to handle normal takeoff safety measures for throttle
I have TKOFF_THR_MINACC=5 and TKOFF_THR_MINSPD=0. I have verified that the full throttle starts only when I shake or move forward quickly the plane while in the first waypoint of AUTO mode, so I suppose it is in the takeoff stage and everything is normal (I just thought that throttle joystick needs to be at maximum after reading the sentence: “the autopilot starts in “throttle suppressed” mode”).
flight was generally low altitude
yes, I just wanted to do short missions to check landing.
DO_LAND_SART altitude is 66m? Altitude is ignored for this cmd.
I knew altitude was ignored, so I entered a random number. I inserted this DO_LAND_START command because i wanted the landing abort not to go back to the previous waypoint, but to a particular one so the last waypoints before landing were aligned.
glide slope is shallow, 5.5deg. Is a steeper slope possible? If so, better to start the glide slope from higher up
I have done two landings today with 10deg
LAND waypoint alt is 2m. Why?
I have done only this one flight with LAND altitude set to 2meters, just to check if the problem was related to baro drift. Intended landing point is actually about 2 meters above home due to the ground slope, so I wanted to be more precise about real ground location.
WAYPOINT → LAND alt transition is only 13m delta. It’s hard for the autopilot to stabilize in that short window. Your altitude is bumpy at the start and on the way down because of this.
Changed to 30 meters.
RNGFND_LANDING=1 while RNGFND_TYPE=0 so Rangefinder is disababled but you’ve configured landing algorithm to expect it. It logs a height of zero because of this
My fault. Sonar was lost in the last crash and forgot to disable. Changed!
THR_MIN = 3?
No idea  changed to 0 now.
changed to 0 now.
TECS_LAND_ARSPD = 8, but ARSPD_FBW_MIN=10 with STALL_PREVENTION=1. This means you’re commanding it to stall during a land but other constraints are saving you. You are confusing the autopilot.
That’s a good point. TECS_LAND_ARSP was set to 8 because first landings with Arduplane 3.8b5 were at too much (IMO) speed. I thought that the reason was that that I had set MIN_GNDSPD_CM to 10 m/s to assure a minimum ground speed in the case of some head wind, and this constrain was being applied also during landing. So I set MIN_GNDSPD_CM to 0 and set TECS_LAND_ARSP to 8 to force a reasonable landing speed. I had asked to Bormatec about the stall speed and they told me that 8 m/s is a minimum but safe airspeed, above stall. Just in case, I have set TECS_LAND_ARSPD to -1.
So, I have done all the suggested changes to parameters and have done two flights today, the same short missions in the same place.
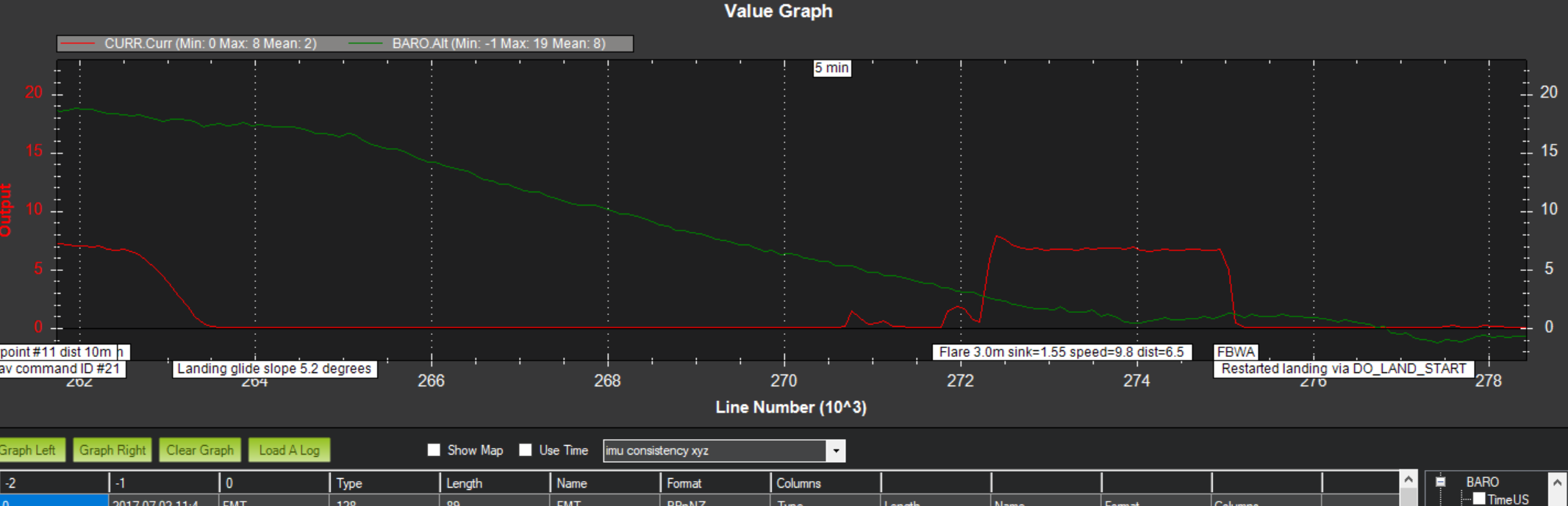
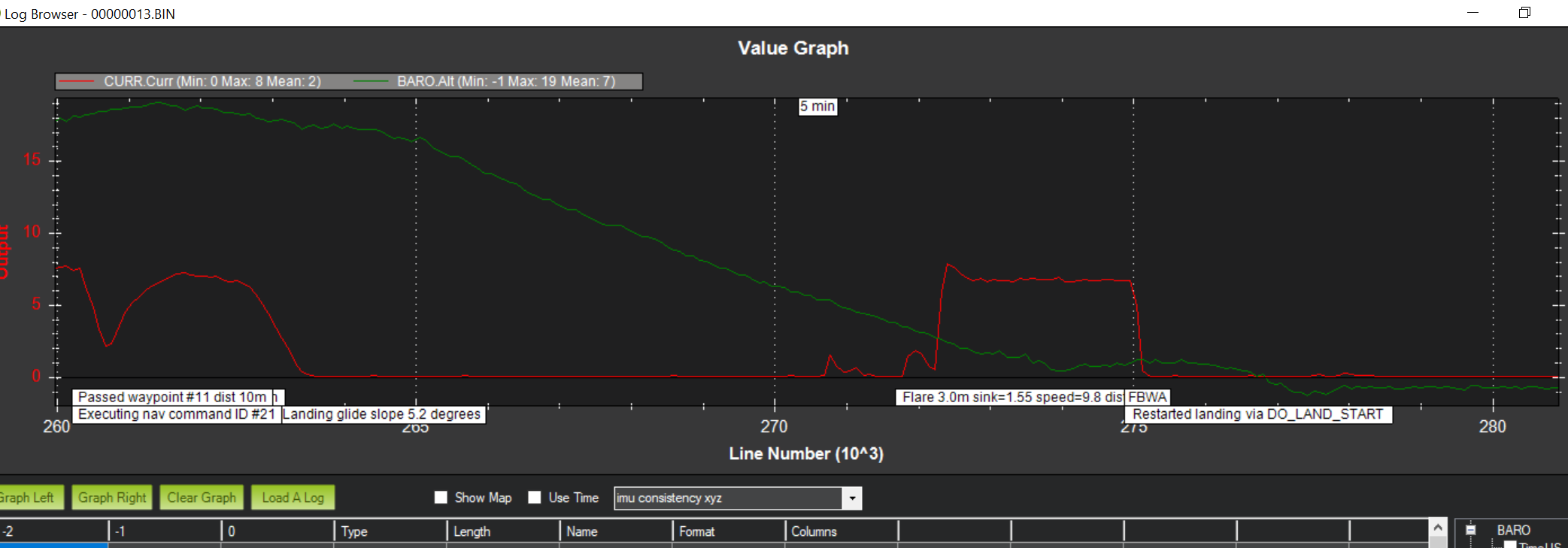
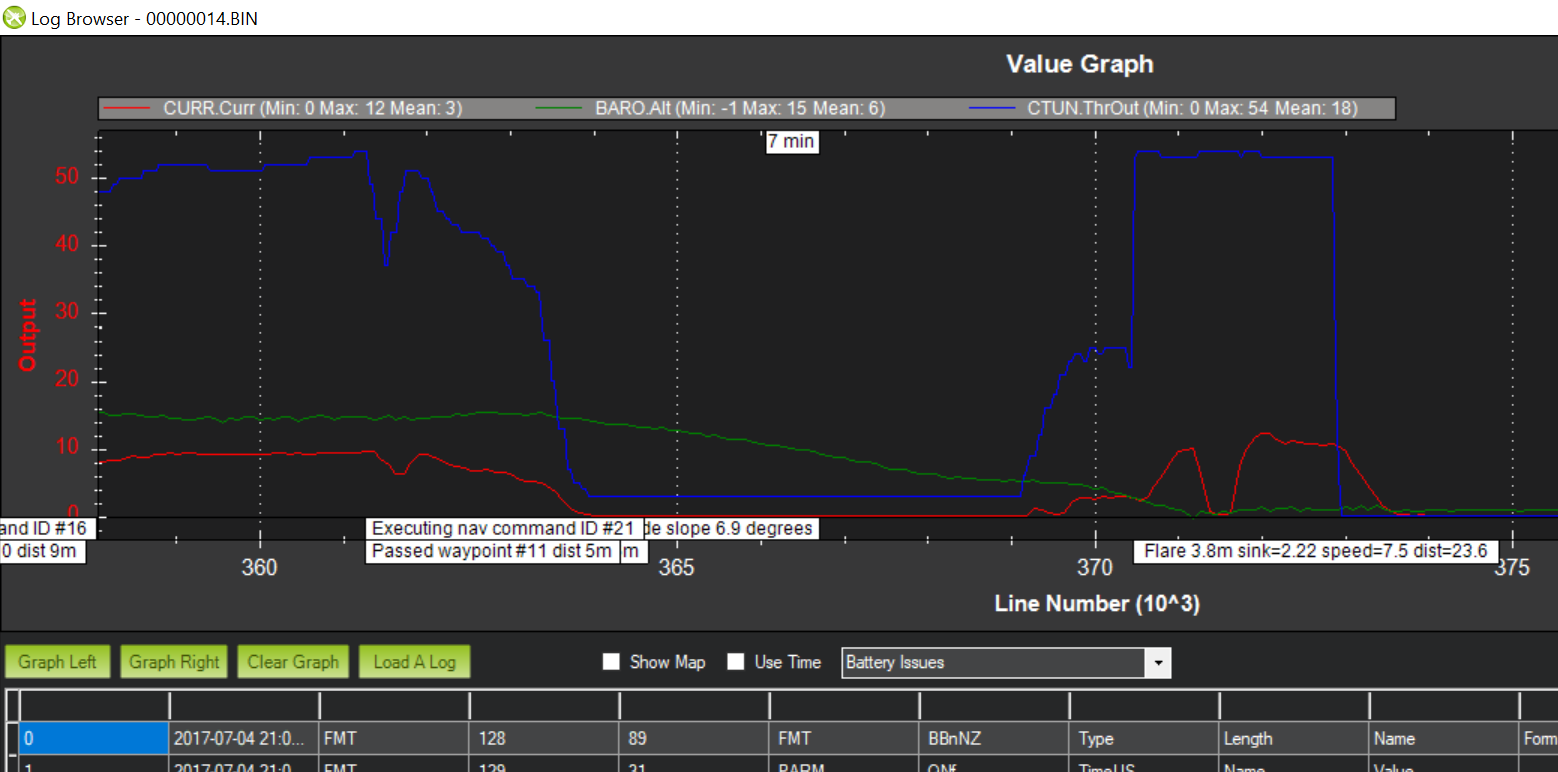
In the first flight, I left the throttle joystick at about 50% during all the mission, the plane landed very well, but the throttle was risen to 50% right at the start of flare, as can be seen in the log:
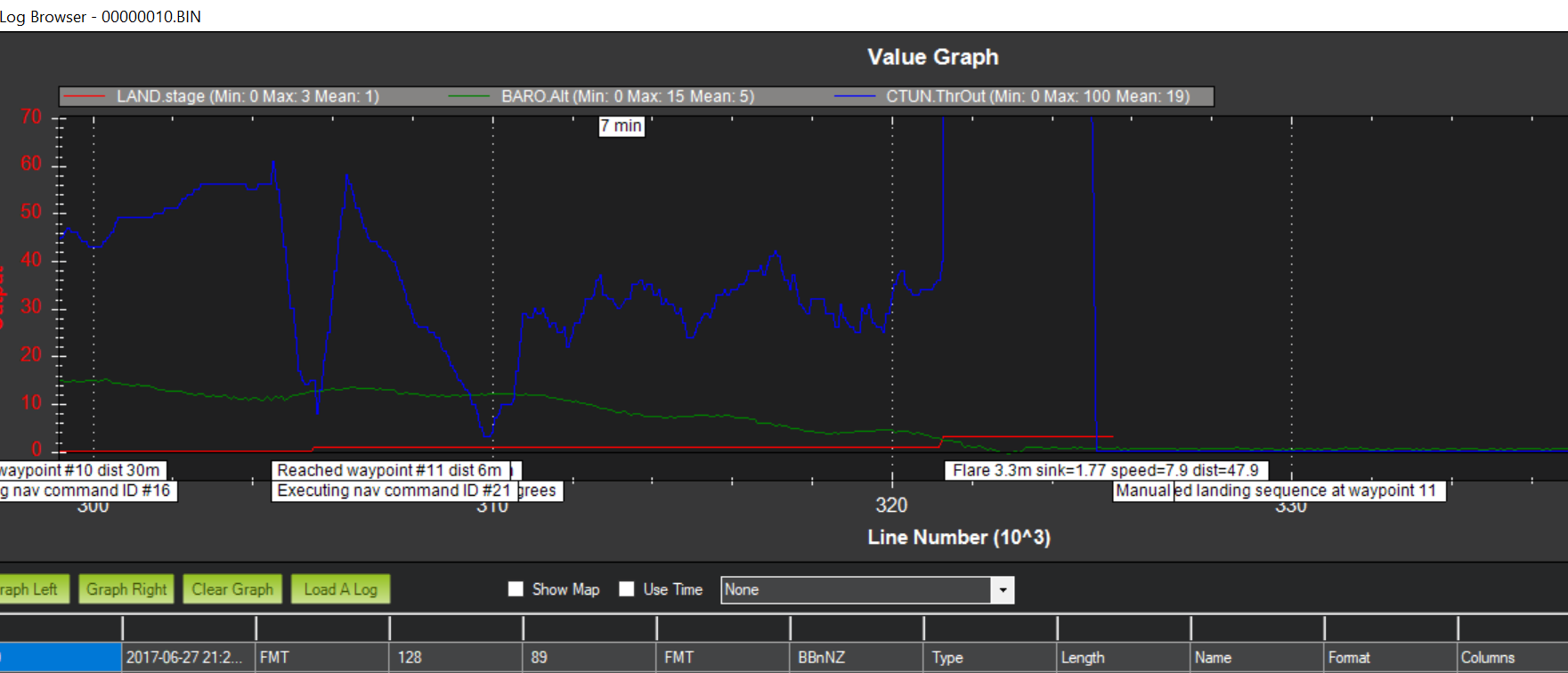
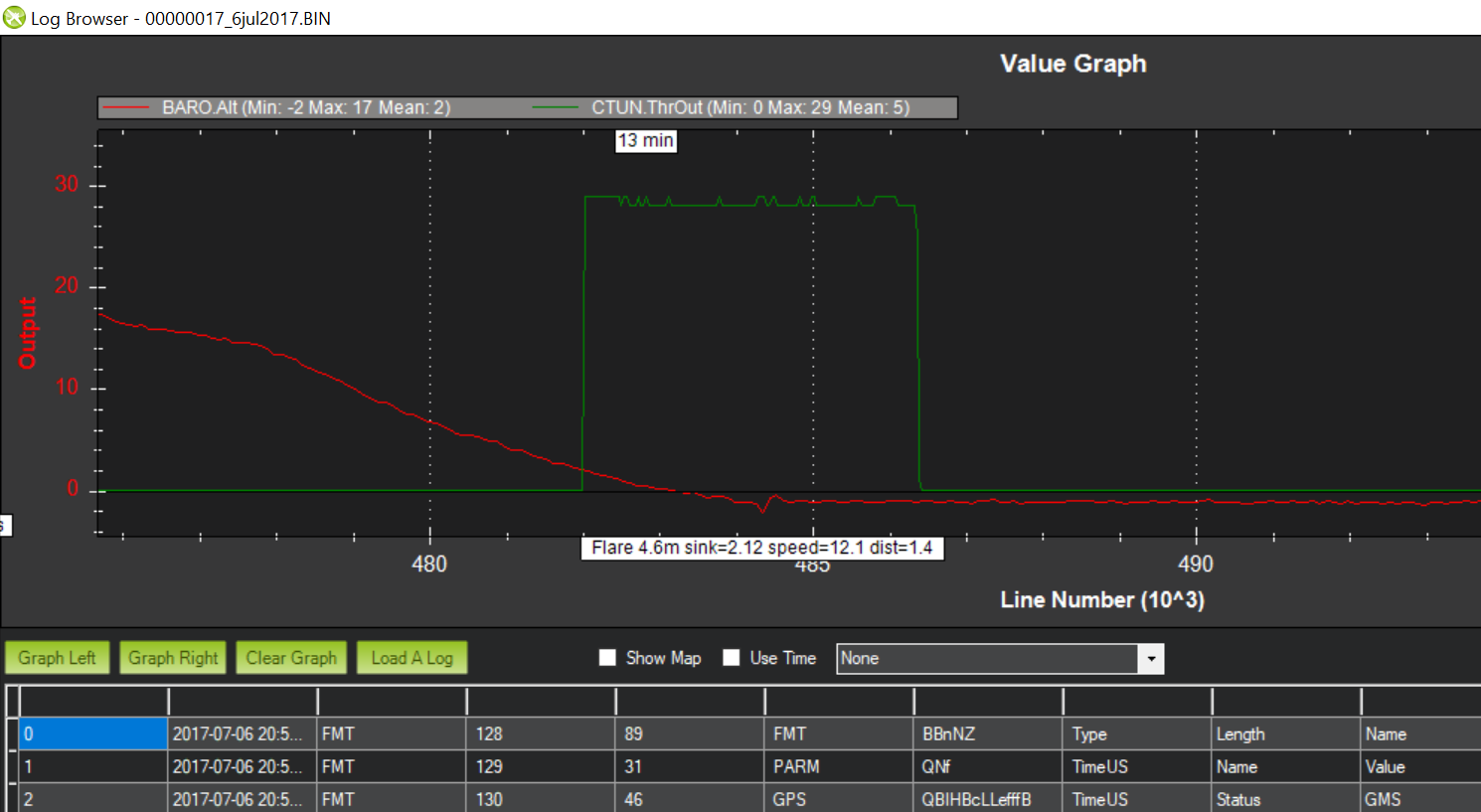
For the second flight, I left throttle at 30% and motor engaged with this value at the start of flare:
After several seconds, without doing anything, the throttle cut itself.
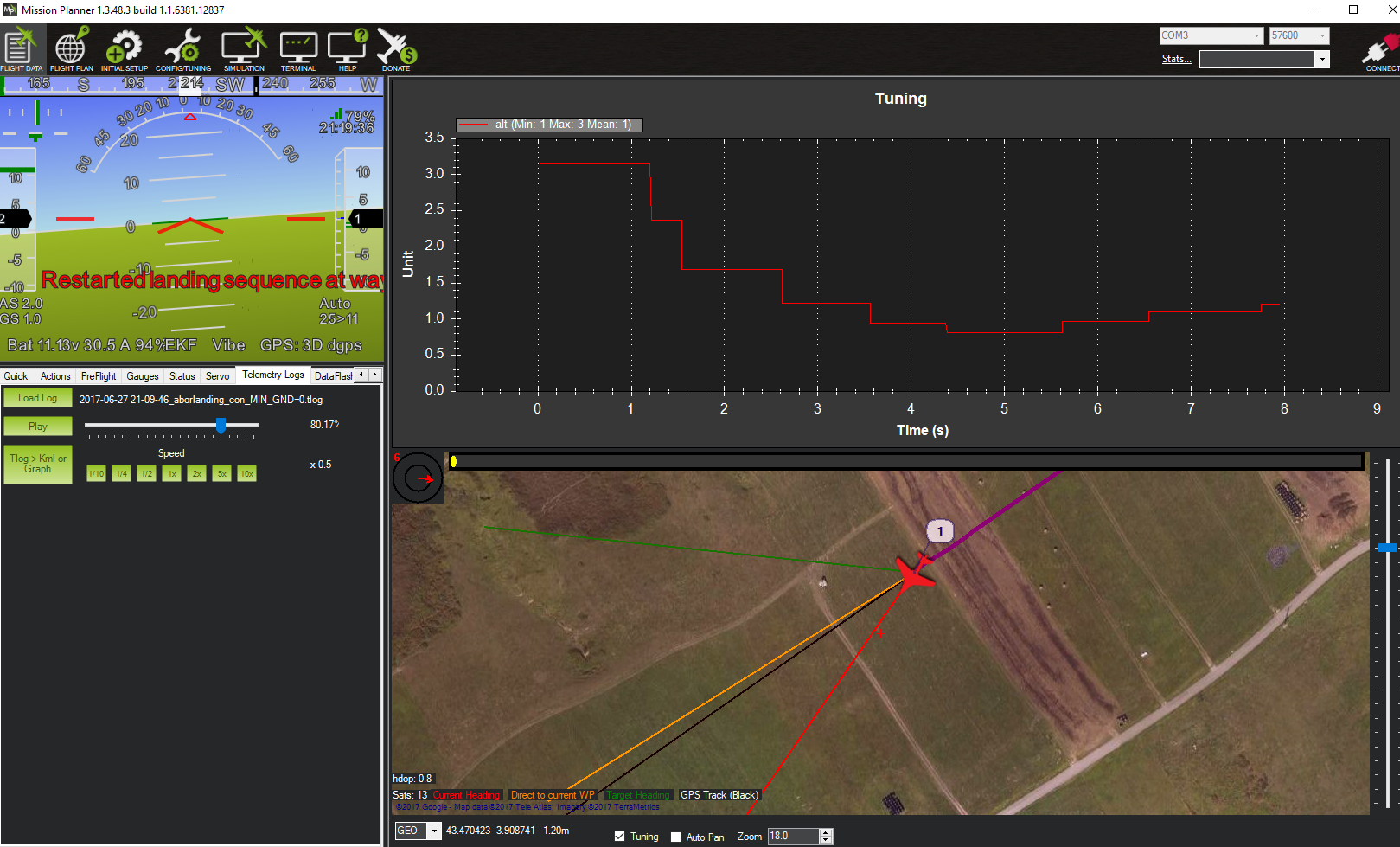
What I can confirm is that the message “restarted landing sequence” that was the origin of my concern and the title of this post, is actually happening when I change mode after or during landing, not a condition generated by the autopilot.
And, above all, landing is now fine for me, I just have to remember to lower the throttle to 0 before landing.
Thankyou again for your time and all the suggestions.
Regards!
Adolfo.
https://www.dropbox.com/s/lwqb8e9m1gi3sdb/00000017_6jul2017.BIN?dl=0
https://www.dropbox.com/s/y9jm6q9xz302h21/2017-07-06%2020-32-13.tlog?dl=0
https://www.dropbox.com/s/hqgnxek1e9v5x1l/Maja%20parameters%206jul2017_after_magicRuB_reply.param?dl=0