I’m in the process of tuning the Plane autopilot for FBWB and Loiter.
I have a custom-built electric glider, twin engine, 20 ft span. The goal is to do autonomous endurance flights.
I went through the AutoTune and TECS tuning guide in FBWA and flew in Loiter for 1.5 h. I noticed that the controller varies the throttle setting quite a lot i.e. going from 0-100%, as it tries to keep airspeed and altitude. I care most about the power consumption, so I want the controller to react more slowly and keep a more constant throttle setting. How can this be achieved?
Thanks!
params_pre_flight.param (18.1 KB)
params_post_flight.param (18.1 KB)
logs: 2023-04-27 11-47-56.bin - Google Drive
1 Like
Some more info:
- ArduPlane V4.3.4 (f73e812f)
- 6 m Span
- Electric twin motor
- 4S Li-Ion
- Pixhawk 6x
- SDP3x Airspeed Sensor
- SunnySky 3508 motor
- ExpressLRS Diversity RC Receiver
TECS_SPDWEIGHT is set to 2.
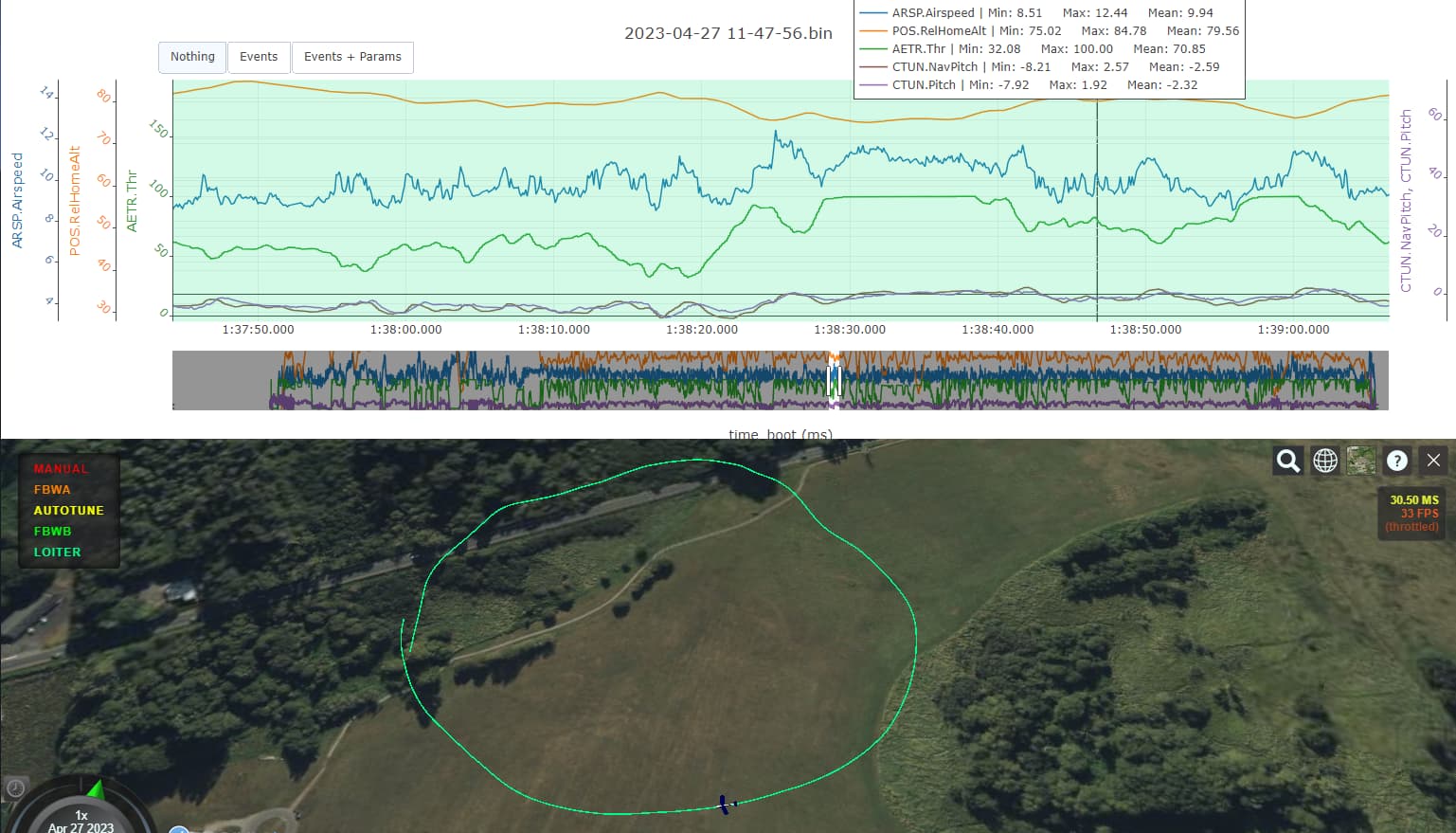
Here is a typical Loiter segment. When the aircraft gets a tailwind, it loses some altitude. It goes full throttle to climb but over-speeds (cruise speed is 10 m/s) and pitches up a few degrees to slow down.
If its sinking downwind and going full throttle your radius might be too small or maybe its not truly using airspeed, otherwise you have disproven the age old downwind turn myth.
Whats the tecs speed weight again? Is it the 0-2 weight of pitch for speed or throttle for speed?
The radius is 120 m, and TECS_SPDWEIGHT is set to 2.0.
TECS_SPDWEIGHT: Weighting applied to speed control¶
Note: This parameter is for advanced users
Mixing of pitch and throttle correction for height and airspeed errors. Pitch controls altitude and throttle controls airspeed if set to 0. Pitch controls airspeed and throttle controls altitude if set to 2 (good for gliders). Blended if set to 1.
| Increment |
Range |
| 0.1 |
0.0 to 2.0 |
So with it set to 2 if the airspeed drops at all when turning downwind (highly contentious point but if the radius is small enough It could) then the fc will drop the nose to gain airspeed which will result in throttle up to gain height.
How does it fly with the default? Is that at 1 or 0.5 or something? A setting of 2 is for unpowered gliders essentially where pitch is the only method of speed control.
1 Like