yesterday i did my first fully auto mission on 3.9.1 from take off to landing 3 times
3 times the plane does not go down the runway always veers like this
I have set the slew rate but does not seam to work just goes full throttle
if i take off in manual slowly throttle up with no other input goes straight till take off
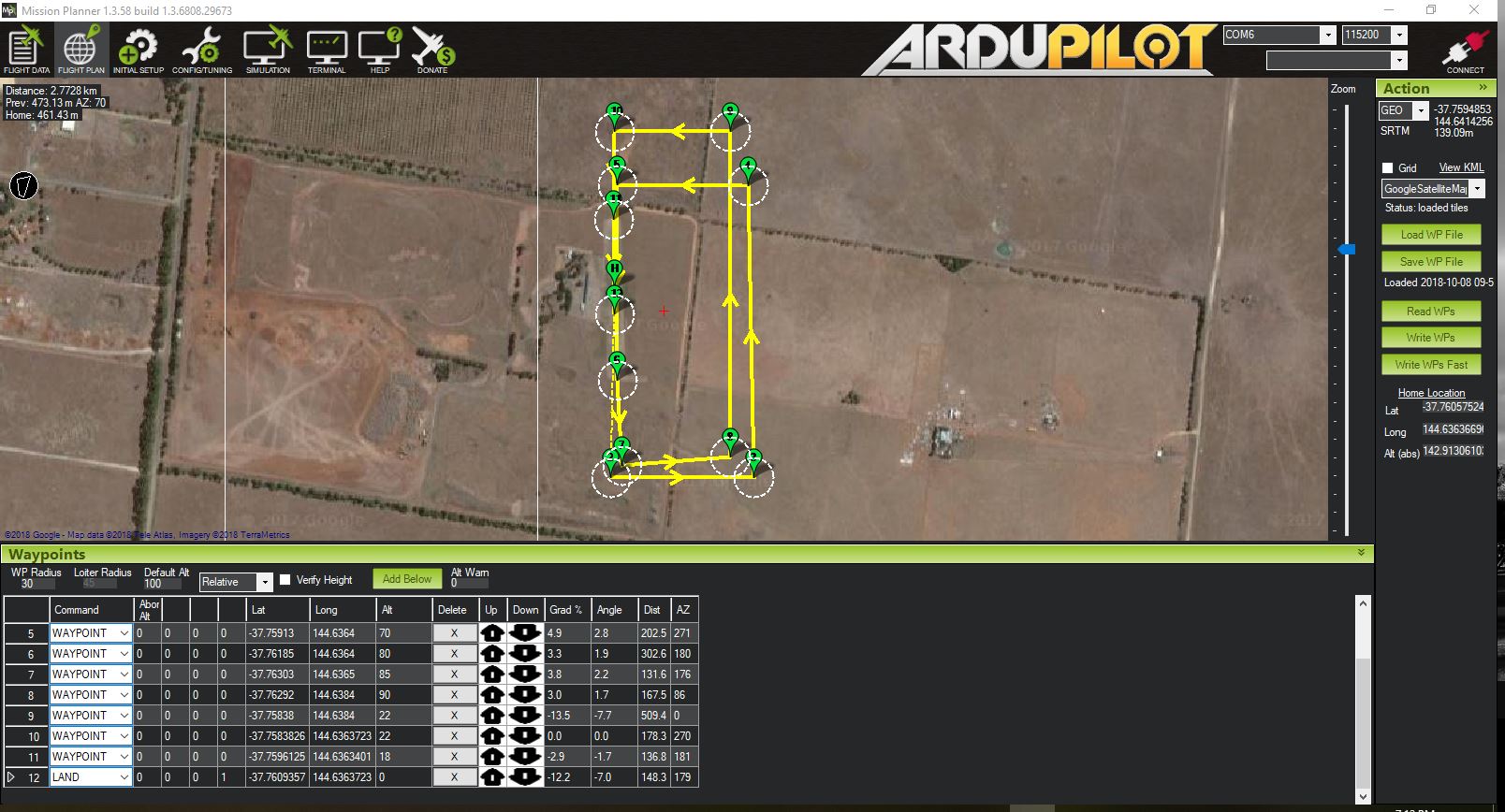
Determining glide slope angle ?
i am hopeless at math
i did 3 test in FBWA and cut the throttle and kept the air speed 14ms to see how much it dopped
i think its H height over D distance = Tan a ?
test 1 it dropped 78 meters over 292 meters it traveled = 15 deg
test 2 it dropped 37 meters over 238 meters it traveled = 8.8 deg
test 3 it dropped 16 meters over 100 meters it traveled = 9.1 deg
so if i did the math right that makes the average 11 deg ?
If you try to determine the angle of the glide path for auto landing, place the WP before HOME at 200 m distance and 20 m high to get about 10 ° which are ideal
Plan a survey landing pattern in qgroundcontrol is the more easy way to Land. Plan in this software and then open it in mission planner : better landing !
Mission planner doesn’t support visualisation of loiter tangent exit whereas qgroundcontrol do it. Loiter tangent exit is supported in arduplane since 3.9 and it’s very cool tout have it for landing !