absolute.param (18.3 KB)
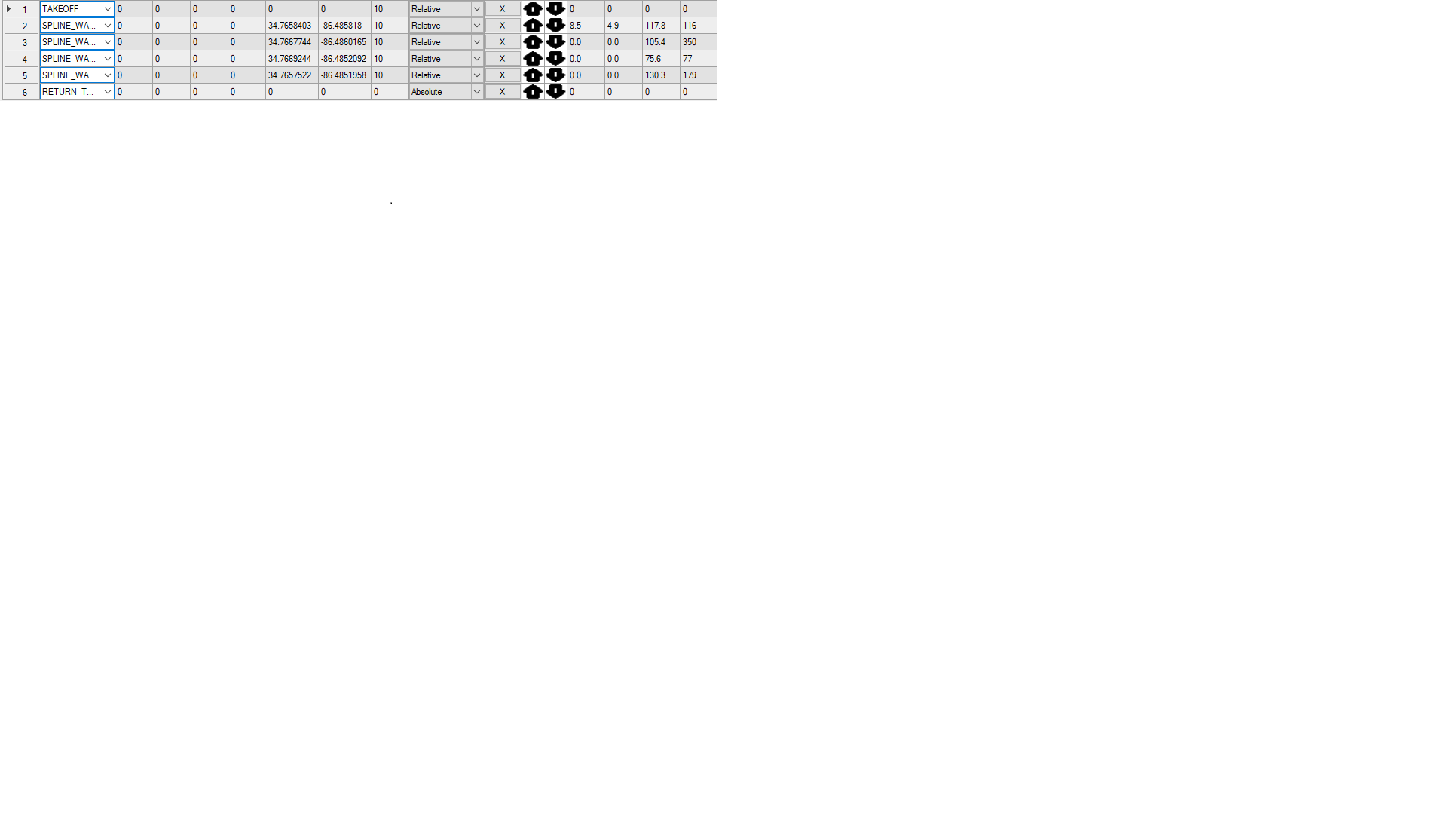
Every time I read my auto mission it is reverting my RTL to absolute from relative any idea why this is happening?
Are completed your auto mission? If not please engage with auto see behavior of UAV at RTL time. If any thing goes wrong, please take UAV into you control. In mission planner after reading way points RTL altitude is showing Absolute, But in mission UAV is following Relative altitude only. Note :- when writing waypoints make sure RTL altitude will be Relative.