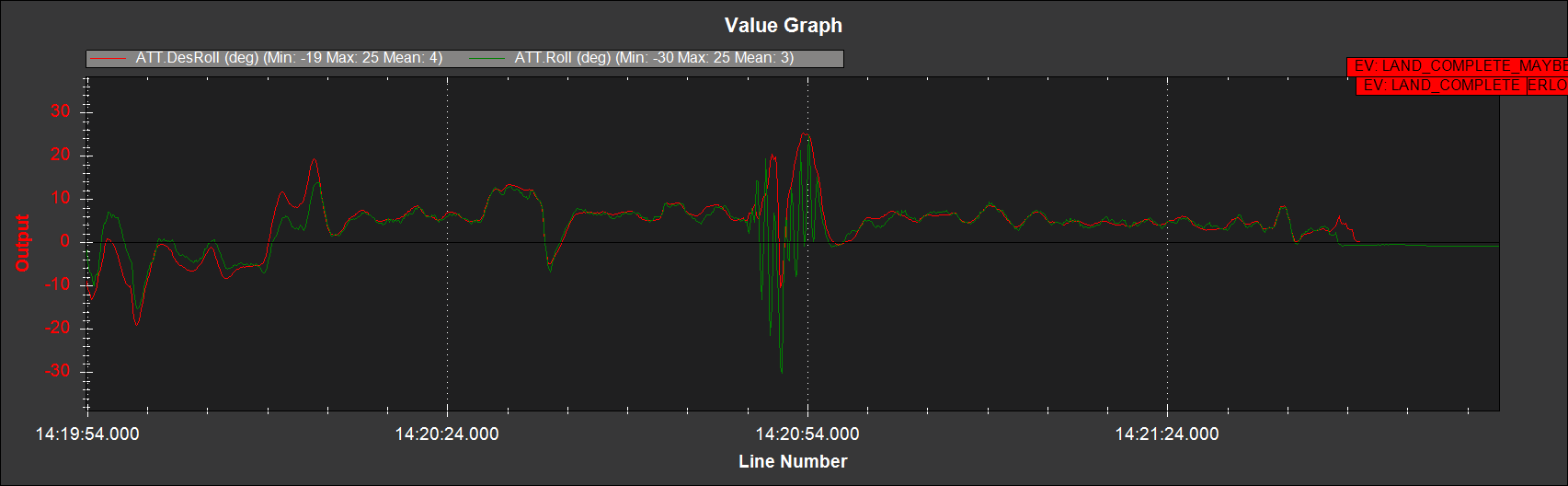
Hello! I had big oscillations during a flight today, and I don’t know if it is because my quadcopter is bad tuning or I am missing something. So maybe you can help me a bit because I think that roll and desired roll does’t match very well.
My quadcopter setup is:
Motor: T-Motor u7 420kv
ESC: Hobbywing x-rotor 80A
Props: 15x5.5
Battery: 6S 16000mAh
FC: The Cube Pixhawk 2.1
Do you thing that it is a PID problem or another thing?
Hi Dave! Yes that drone uses the default PIDs but I don’t know if I can perform an auto tune due to those oscillations, I don’t really know if the problem are the PIDs or a desync problem with an ESC, for example.
I would like to be sure because I don’t want to crash the drone while the auto tune is running.
In any case follow the basic tuning guidelines in the link I provided whether you run Autotune or not. There are several parameters to consider based on your craft.
Be sure to read over all the tuning instructions, but you should be able to start with these for 15inch props:
MOT_THST_EXPO 0.71
INS_ACCEL_FILTER 20
INS_GYRO_FILTER 24
ATC_RAT_PIT_FILTD 12
ATC_RAT_PIT_FILTE 0
ATC_RAT_PIT_FILTT 12
ATC_RAT_RLL_FILTD 12
ATC_RAT_RLL_FILTE 0
ATC_RAT_RLL_FILTT 12
ATC_RAT_YAW_FILTD 0
ATC_RAT_YAW_FILTE 2
ATC_RAT_YAW_FILTT 12
ATC_ACCEL_P_MAX 76000
ATC_ACCEL_R_MAX 76000
ATC_ACCEL_Y_MAX 23000
ACRO_YAW_P 2.5
ATC_THR_MIX_MAN 0.1
MOT_THST_HOVER 0.25 (or less)
MOT_HOVER_LEARN 2
MOT_BAT_VOLT_MAX 25.2
MOT_BAT_VOLT_MIN 19.8
FS_BATT_VOLTAGE 21
And after hover learning
PSC_ACCZ_I 2xMOT_THST_HOVER
PSC_ACCZ_P 1xMOT_THST_HOVER
Thank you all for your answers! I will downgrade to 3.6.11 due to the problem with autotune in 4.0 and I will start with your recommendations. And if all is ok I will try with autotune, so I will keep you updated
Well, finally the problem wasn’t the PIDs of the copter, a closed look to the logs showed that only motor 1 and 2 varied the pwm signal when the copter was unstablle. So I checked those two motors and I realized that a slightly long screw touched the inductor of motor 2, and there was a short circuit between one phase and the screw.
I think that the ESC was in some moments desynchronizedwith the motor due to that problem, and after I changed the motor, the copter flew well. I still have to perform the autotune, but the real problem seems to be solved.