Hello, I want to send a balloon to space for hobby, I want to use pixhawk cube orange for data saving and transferring information to the ground station. I think RFD900X as a telemetry module. it has an average range of 50-80 km. With some antennas, this value goes up to 150km. but there are a few things that stuck to me. Can I use normal gps as a gps (like here3) All equipment is resistant to cold but I am thinking of making insulation in addition to this, would this be a problem?


I’ll be completely honest, I haven’t looked at the chipset in the Here3 to know what kind of limits it experiences. But, what I do know is the limits you’ll run into are COCOM export controls which place limits on GPS operation under the following conditions:
- Total speed greater than or equal to 1,000 knots;
- Altitudes higher than 18 kilometers
(https://en.wikipedia.org/wiki/Coordinating_Committee_for_Multilateral_Export_Controls)
The trick here is whether these conditions are met with an AND or an OR. Different GPS manufactures interpret things differently… the Here3 is based on the u-blox M8P chipset (datasheet), which is specified at a different set of limits than COCOM is:
- <= 4g acceleration (should be easy for your use case)
- 50 kilometers
- 500 meters/second (~971knots)
The datasheet also doesn’t specify whether these are AND’d or OR’d together to determine operation. You may have to reach out to u-blox to find out for sure. From amateur rocketry I have learned that it is not always obvious 
EDIT:
The datasheet also doesn’t specify exactly what happens when those limits are exceeded – but if memory serves, the GPS I was investigating for a not-too-different purpose (I think an F9 chipset?) would simply stop outputting information altogether, which may cause failsafe activation on the Cube. Just an FYI.
Hope this helps!
2 Likes
Thank you very much for your nice and honest answers, I was hesitant about GPS. Some GPSs used with Arduino have sent balloons to space or sent professionally used GPS into space. I need to look into GPS a little bit more. But I’m undecided about the Pixhawk Cube (STM32H753 Processor). I’m thinking of slowing down the back to earth phase with the parachute. So I’m thinking of staying within the limit
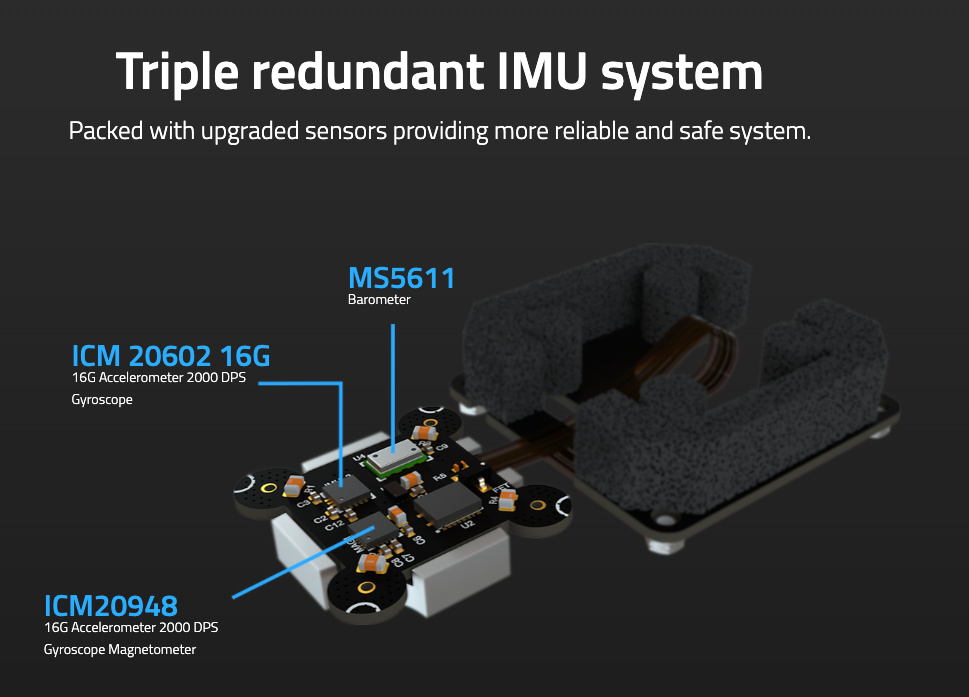
Operating temperature -10~+55° IMU with temperature control
EDIT : If I go back to the limits (falling back to earth) does the gps start to work ? for example there is a 50 km limit and I dropped to 30 km. Will the GPS be active again ?
If I go back to the limits (falling back to earth) does the gps start to work ? for example there is a 50 km limit and I dropped to 30 km. Will the GPS be active again ?
Yep, it should! (disclaimer: I never actually got to launch the rocket I was investigating this for, so haven’t proved it experimentally. But every manufacturer I reached out to indicated the answer is yes)
As for the temperature control, the boards have a builtin IMU heating element that has proven to be pretty cold-resistant. I’m in North Dakota, which isn’t known for balmy warm weather, and both the Cube Orange and Black were happily able to heat themselves to 45-60C in ambient temperatures of -30C. Just give it 10min powered on before launch to come to temperature. (again, disclaimer: this is outside of the temp limits of the cube officially, but the drone flew fine anyways).
If you’re not doing attitude control, or complex path mapping, the I would imagine the H7 processor would be plenty powerful enough… although I don’t know how ArduPilot would react to being lofted into the air with no way to control itself. My bet is the thrust loss checker would activate, and honestly I don’t know what would happen after that.
For what it’s worth, the Holybro Durandal is also an FMUv6 flight controller, but it has a better set of temperature ranges, -40 ~ 85°c(claimed), so if you haven’t bought the cube yet, maybe consider the Durandal in stead of the cube?
I haven’t tested it to -30, but I’ve run cube orange to -10c many times without issues.
I’ve also used a cube orange as a passenger on a DJI drone because I needed it to collect data from a custom sensor and send it back over a telemetry link. It does work, but I haven’t found the best way to log data. If I use LOG_DISARM=1 I end up with these excessively large data files with lots of useless data as we do ground checks. In a previous version of the project I was arming the controller (even though it wasn’t doing anything). I had ArduPlane installed and it didn’t seem to mind sitting armed for long periods without doing anything. ArduCopter will disarm if things don’t start happening. (There might be a way to disable that, but I haven’t tried yet)
1 Like
It was a nice experience sharing, I’ll run it as an arduplane and of course there is a value for this situation in the parameter list. thank you, healthy days
Hello again, I’ve had a quick look into this as it genuinely intrigues me, from what I can find, weather balloons can go up to an altitude of ~50km which then got me ondering what sorts of temperatures would you be likely to encounter along that range, and I found this cool graph:
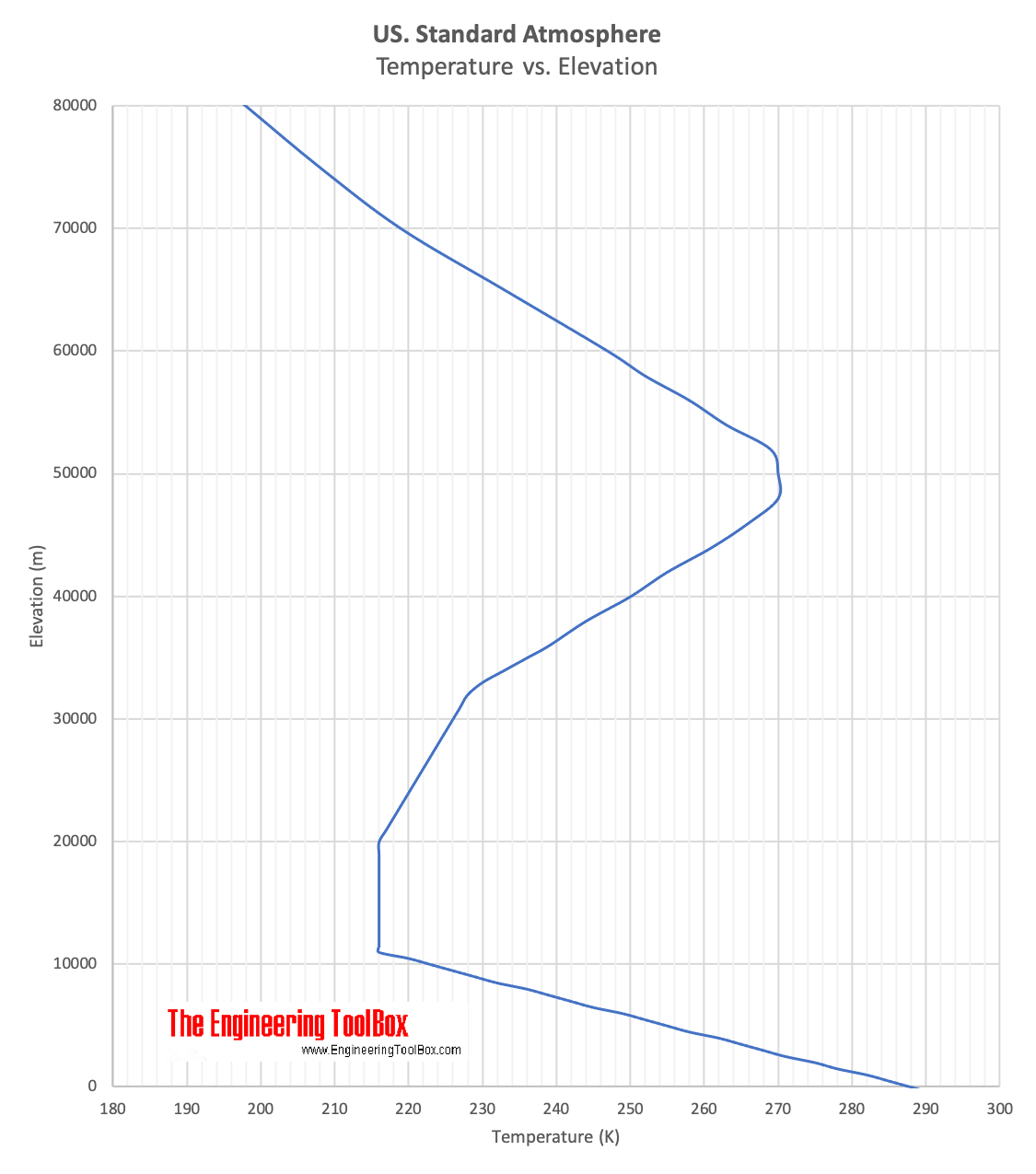
which was taken from engineering toolbox’s website:
https://www.engineeringtoolbox.com/standard-atmosphere-d_604.html
According to that website, the lowest temperatures you are likely to see will be around -56.5°C which is below the lowest stated temperatures of either the cube or Durandal, but given they have internal heating, there will be a positive temperature delta, which might nudge their internal sensor modules back to within their operating temperature ranges? I’m only speculating on that last part about the temperature delta etc, as I haven’t looked up the sensors list from the FMS’s specs and cross referenced that against the individual sensors datasheets, but that won’t take you long.
Good luck with the project, and I hope to see a thread about it.
3 Likes
@Allister ArduCopter will disarm if things don’t start happening. (There might be a way to disable that, but I haven’t tried yet)
Set DISARM_DELAY to zero, should do the trick!
(You may also want to increase BRD_IMU_TARGTEMP to 60 or so to increase the output of the heater)
No idea if this works on Plane, I’ve only ever touched Copter.
I know it would consume power, but what about putting a peltier onto the aluminium casing?
A peltier seems like a good idea only if you need cooling. A normal heating element will probably be better/cheaper/lighter for just heating purposes. I was about to say more efficient, but it’s a heating element, which means it’s 100% efficient all the time.
1 Like
Ah see! There you go. I knew it would be easy. Thanks!
I’m many KM north west of you, so I understand your climate. I’ll keep the target temp setting in mind, but I’m going to ignore it for now because we’re just coming out of winter and I’d like to enjoy some summer for a while. ![]()
1 Like
With a CUAV Nora in subzero © temperatures I’ve learned to toggle power after the IMU heating-up period, otherwise I’d get repeated “Bad Gyro Health” messages over the telemetry during the flight. It wasn’t any obvious control or craft flight issue, but the messages were annoying.
On the other hand, sending stuff into the harsh environment of the stratosphere needs some planning. Not only the IMU’s will be exposed to deep freezing cold, but any batteries onboard, as well. Rendering them useless for the recovery beacon after the trip.
I’d build a heated box, using something like a 3D printer print-bed heater, and store the batteries and electronics inside.
FC log-wise, you have a bitmask for the recorded parameters. I’m sure there’s a list of all the bit values regarding what’s logged somewhere, so one can tune it down to only what’s needed for the space trip.
2 Likes