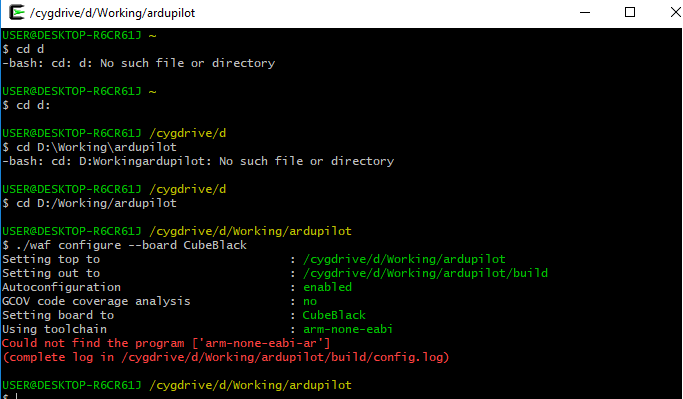
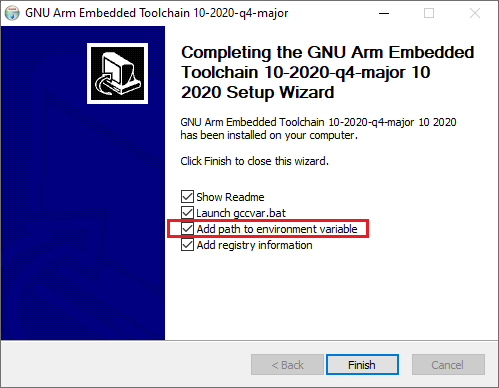
I followed the steps given in http://ardupilot.org/dev/docs/building-setup-windows-cygwin.html#building-setup-windows-cygwin
still getting below error
$ ./waf copter
Waf: Entering directory `/cygdrive/c/ardupilot/build/CubeBlack’
Padded 16 bytes for bootloader.bin
Embedding file io_firmware.bin:Tools/IO_Firmware/fmuv2_IO.bin
Embedding file bootloader.bin:/cygdrive/c/ardupilot/Tools/bootloaders/CubeBlack_bl.bin
Checking for env.py
No env.py found
[3/8] Creating build/CubeBlack/hwdef.h
[4/8] Creating build/CubeBlack/modules/ChibiOS/include_dirs
[5/8] Processing modules/mavlink/message_definitions/v1.0/ardupilotmega.xml
Including /cygdrive/c/ardupilot/libraries/AP_HAL_ChibiOS/hwdef/fmuv3/hwdef.dat
Adding environment OPTIMIZE -O3
Removing PB0
Removing PB1
Setup for MCU STM32F427xx
Writing hwdef setup in /cygdrive/c/ardupilot/build/CubeBlack/hwdef.h
Writing DMA map
Generating ldscript.ld
Adding defaults.parm
[6/8] Processing uavcangen: modules/uavcan/dsdl/uavcan/CoarseOrientation.uavcan modules/uavcan/dsdl/uavcan/Timestamp.uavcan modules/uavcan/dsdl/uavcan/equipment/actuator/1010.ArrayCommand.uavcan modules/uavcan/dsdl/uavcan/equipment/actuator/1011.Status.uavcan modules/uavcan/dsdl/uavcan/equipment/actuator/Command.uavcan modules/uavcan/dsdl/uavcan/equipment/ahrs/1000.Solution.uavcan modules/uavcan/dsdl/uavcan/equipment/ahrs/1001.MagneticFieldStrength.uavcan modules/uavcan/dsdl/uavcan/equipment/ahrs/1002.MagneticFieldStrength2.uavcan modules/uavcan/dsdl/uavcan/equipment/ahrs/1003.RawIMU.uavcan modules/uavcan/dsdl/uavcan/equipment/air_data/1020.TrueAirspeed.uavcan modules/uavcan/dsdl/uavcan/equipment/air_data/1021.IndicatedAirspeed.uavcan modules/uavcan/dsdl/uavcan/equipment/air_data/1025.AngleOfAttack.uavcan modules/uavcan/dsdl/uavcan/equipment/air_data/1026.Sideslip.uavcan modules/uavcan/dsdl/uavcan/equipment/air_data/1027.RawAirData.uavcan modules/uavcan/dsdl/uavcan/equipment/air_data/1028.StaticPressure.uavcan modules/uavcan/dsdl/uavcan/equipment/air_data/1029.StaticTemperature.uavcan modules/uavcan/dsdl/uavcan/equipment/camera_gimbal/1040.AngularCommand.uavcan modules/uavcan/dsdl/uavcan/equipment/camera_gimbal/1041.GEOPOICommand.uavcan modules/uavcan/dsdl/uavcan/equipment/camera_gimbal/1044.Status.uavcan modules/uavcan/dsdl/uavcan/equipment/camera_gimbal/Mode.uavcan modules/uavcan/dsdl/uavcan/equipment/device/1110.Temperature.uavcan modules/uavcan/dsdl/uavcan/equipment/esc/1030.RawCommand.uavcan modules/uavcan/dsdl/uavcan/equipment/esc/1031.RPMCommand.uavcan modules/uavcan/dsdl/uavcan/equipment/esc/1034.Status.uavcan modules/uavcan/dsdl/uavcan/equipment/gnss/1060.Fix.uavcan modules/uavcan/dsdl/uavcan/equipment/gnss/1061.Auxiliary.uavcan modules/uavcan/dsdl/uavcan/equipment/gnss/1062.RTCMStream.uavcan modules/uavcan/dsdl/uavcan/equipment/gnss/1063.Fix2.uavcan modules/uavcan/dsdl/uavcan/equipment/gnss/ECEFPositionVelocity.uavcan modules/uavcan/dsdl/uavcan/equipment/hardpoint/1070.Command.uavcan modules/uavcan/dsdl/uavcan/equipment/hardpoint/1071.Status.uavcan modules/uavcan/dsdl/uavcan/equipment/ice/1129.FuelTankStatus.uavcan modules/uavcan/dsdl/uavcan/equipment/ice/reciprocating/1120.Status.uavcan modules/uavcan/dsdl/uavcan/equipment/ice/reciprocating/CylinderStatus.uavcan modules/uavcan/dsdl/uavcan/equipment/indication/1080.BeepCommand.uavcan modules/uavcan/dsdl/uavcan/equipment/indication/1081.LightsCommand.uavcan modules/uavcan/dsdl/uavcan/equipment/indication/RGB565.uavcan modules/uavcan/dsdl/uavcan/equipment/indication/SingleLightCommand.uavcan modules/uavcan/dsdl/uavcan/equipment/power/1090.PrimaryPowerSupplyStatus.uavcan modules/uavcan/dsdl/uavcan/equipment/power/1091.CircuitStatus.uavcan modules/uavcan/dsdl/uavcan/equipment/power/1092.BatteryInfo.uavcan modules/uavcan/dsdl/uavcan/equipment/range_sensor/1050.Measurement.uavcan modules/uavcan/dsdl/uavcan/equipment/safety/1100.ArmingStatus.uavcan modules/uavcan/dsdl/uavcan/navigation/2000.GlobalNavigationSolution.uavcan modules/uavcan/dsdl/uavcan/protocol/1.GetNodeInfo.uavcan modules/uavcan/dsdl/uavcan/protocol/2.GetDataTypeInfo.uavcan modules/uavcan/dsdl/uavcan/protocol/341.NodeStatus.uavcan modules/uavcan/dsdl/uavcan/protocol/4.GetTransportStats.uavcan modules/uavcan/dsdl/uavcan/protocol/4.GlobalTimeSync.uavcan modules/uavcan/dsdl/uavcan/protocol/5.Panic.uavcan modules/uavcan/dsdl/uavcan/protocol/5.RestartNode.uavcan modules/uavcan/dsdl/uavcan/protocol/6.AccessCommandShell.uavcan modules/uavcan/dsdl/uavcan/protocol/CANIfaceStats.uavcan modules/uavcan/dsdl/uavcan/protocol/DataTypeKind.uavcan modules/uavcan/dsdl/uavcan/protocol/HardwareVersion.uavcan modules/uavcan/dsdl/uavcan/protocol/SoftwareVersion.uavcan modules/uavcan/dsdl/uavcan/protocol/debug/16370.KeyValue.uavcan modules/uavcan/dsdl/uavcan/protocol/debug/16383.LogMessage.uavcan modules/uavcan/dsdl/uavcan/protocol/debug/LogLevel.uavcan modules/uavcan/dsdl/uavcan/protocol/dynamic_node_id/1.Allocation.uavcan modules/uavcan/dsdl/uavcan/protocol/dynamic_node_id/server/30.AppendEntries.uavcan modules/uavcan/dsdl/uavcan/protocol/dynamic_node_id/server/31.RequestVote.uavcan modules/uavcan/dsdl/uavcan/protocol/dynamic_node_id/server/390.Discovery.uavcan modules/uavcan/dsdl/uavcan/protocol/dynamic_node_id/server/Entry.uavcan modules/uavcan/dsdl/uavcan/protocol/enumeration/15.Begin.uavcan modules/uavcan/dsdl/uavcan/protocol/enumeration/380.Indication.uavcan modules/uavcan/dsdl/uavcan/protocol/file/40.BeginFirmwareUpdate.uavcan modules/uavcan/dsdl/uavcan/protocol/file/45.GetInfo.uavcan modules/uavcan/dsdl/uavcan/protocol/file/46.GetDirectoryEntryInfo.uavcan modules/uavcan/dsdl/uavcan/protocol/file/47.Delete.uavcan modules/uavcan/dsdl/uavcan/protocol/file/48.Read.uavcan modules/uavcan/dsdl/uavcan/protocol/file/49.Write.uavcan modules/uavcan/dsdl/uavcan/protocol/file/EntryType.uavcan modules/uavcan/dsdl/uavcan/protocol/file/Error.uavcan modules/uavcan/dsdl/uavcan/protocol/file/Path.uavcan modules/uavcan/dsdl/uavcan/protocol/param/10.ExecuteOpcode.uavcan modules/uavcan/dsdl/uavcan/protocol/param/11.GetSet.uavcan modules/uavcan/dsdl/uavcan/protocol/param/Empty.uavcan modules/uavcan/dsdl/uavcan/protocol/param/NumericValue.uavcan modules/uavcan/dsdl/uavcan/protocol/param/Value.uavcan modules/uavcan/dsdl/uavcan/tunnel/2010.Broadcast.uavcan modules/uavcan/dsdl/uavcan/tunnel/63.Call.uavcan modules/uavcan/dsdl/uavcan/tunnel/Protocol.uavcan
[7/8] Creating build/CubeBlack/ap_version.h
Compiler failure
Traceback (most recent call last):
File “/cygdrive/c/ardupilot/modules/uavcan/libuavcan/dsdl_compiler/libuavcan_dsdlc”, line 61, in
dsdlc_run(args.source_dir, args.incdir, args.outdir)
File “/cygdrive/c/ardupilot/modules/uavcan/libuavcan/dsdl_compiler/libuavcan_dsdl_compiler/init.py”, line 62, in run
run_generator(types, output_dir)
File “/cygdrive/c/ardupilot/modules/uavcan/libuavcan/dsdl_compiler/libuavcan_dsdl_compiler/init.py”, line 111, in run_generator
die(ex)
File “/cygdrive/c/ardupilot/modules/uavcan/libuavcan/dsdl_compiler/libuavcan_dsdl_compiler/init.py”, line 89, in die
raise DsdlCompilerException(str(text))
DsdlCompilerException: line 16, col 17: invalid syntax (, line 1)
line 16, col 17: invalid syntax (, line 1)
uavcangen returned 1 error code
Validation skipped for /cygdrive/c/ardupilot/modules/mavlink/message_definitions/v1.0/ardupilotmega.xml.
Parsing /cygdrive/c/ardupilot/modules/mavlink/message_definitions/v1.0/ardupilotmega.xml
Note: message DATA64 is longer than 64 bytes long (74 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message DATA96 is longer than 64 bytes long (106 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message REMOTE_LOG_DATA_BLOCK is longer than 64 bytes long (214 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message DEVICE_OP_READ_REPLY is longer than 64 bytes long (143 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message DEVICE_OP_WRITE is longer than 64 bytes long (187 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Validation skipped for /cygdrive/c/ardupilot/modules/mavlink/message_definitions/v1.0/common.xml.
Parsing /cygdrive/c/ardupilot/modules/mavlink/message_definitions/v1.0/common.xml
Note: message GPS_STATUS is longer than 64 bytes long (109 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message ATTITUDE_QUATERNION_COV is longer than 64 bytes long (80 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message GLOBAL_POSITION_INT_COV is longer than 64 bytes long (189 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message LOCAL_POSITION_NED_COV is longer than 64 bytes long (233 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message HIL_ACTUATOR_CONTROLS is longer than 64 bytes long (89 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message GLOBAL_VISION_POSITION_ESTIMATE is longer than 64 bytes long (124 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message VISION_POSITION_ESTIMATE is longer than 64 bytes long (124 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message VICON_POSITION_ESTIMATE is longer than 64 bytes long (124 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message HIGHRES_IMU is longer than 64 bytes long (70 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message HIL_SENSOR is longer than 64 bytes long (72 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message SIM_STATE is longer than 64 bytes long (92 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message FILE_TRANSFER_PROTOCOL is longer than 64 bytes long (262 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message HIL_STATE_QUATERNION is longer than 64 bytes long (72 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message LOG_DATA is longer than 64 bytes long (105 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message GPS_INJECT_DATA is longer than 64 bytes long (121 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message SERIAL_CONTROL is longer than 64 bytes long (87 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message ENCAPSULATED_DATA is longer than 64 bytes long (263 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message ATT_POS_MOCAP is longer than 64 bytes long (128 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message RESOURCE_REQUEST is longer than 64 bytes long (251 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message FOLLOW_TARGET is longer than 64 bytes long (101 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message CONTROL_SYSTEM_STATE is longer than 64 bytes long (108 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message AUTOPILOT_VERSION is longer than 64 bytes long (86 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message LANDING_TARGET is longer than 64 bytes long (68 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message GPS_INPUT is longer than 64 bytes long (71 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message GPS_RTCM_DATA is longer than 64 bytes long (190 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message HOME_POSITION is longer than 64 bytes long (68 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message SET_HOME_POSITION is longer than 64 bytes long (69 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message V2_EXTENSION is longer than 64 bytes long (262 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message PLAY_TUNE is longer than 64 bytes long (240 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message CAMERA_INFORMATION is longer than 64 bytes long (243 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message CAMERA_IMAGE_CAPTURED is longer than 64 bytes long (263 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message LOGGING_DATA is longer than 64 bytes long (263 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message LOGGING_DATA_ACKED is longer than 64 bytes long (263 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message WIFI_CONFIG_AP is longer than 64 bytes long (104 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message UAVCAN_NODE_INFO is longer than 64 bytes long (124 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message OBSTACLE_DISTANCE is longer than 64 bytes long (166 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message ODOMETRY is longer than 64 bytes long (238 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message DEBUG_FLOAT_ARRAY is longer than 64 bytes long (260 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message STATUSTEXT_LONG is longer than 64 bytes long (263 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message WHEEL_DISTANCE is longer than 64 bytes long (145 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Validation skipped for /cygdrive/c/ardupilot/modules/mavlink/message_definitions/v1.0/uAvionix.xml.
Parsing /cygdrive/c/ardupilot/modules/mavlink/message_definitions/v1.0/uAvionix.xml
Validation skipped for /cygdrive/c/ardupilot/modules/mavlink/message_definitions/v1.0/icarous.xml.
Parsing /cygdrive/c/ardupilot/modules/mavlink/message_definitions/v1.0/icarous.xml
Merged enum MAV_CMD
Found 222 MAVLink message types in 4 XML files
Generating C implementation in directory /cygdrive/c/ardupilot/build/CubeBlack/libraries/GCS_MAVLink/include/mavlink/v2.0/ardupilotmega
Generating C implementation in directory /cygdrive/c/ardupilot/build/CubeBlack/libraries/GCS_MAVLink/include/mavlink/v2.0/common
Generating C implementation in directory /cygdrive/c/ardupilot/build/CubeBlack/libraries/GCS_MAVLink/include/mavlink/v2.0/uAvionix
Generating C implementation in directory /cygdrive/c/ardupilot/build/CubeBlack/libraries/GCS_MAVLink/include/mavlink/v2.0/icarous
Copying fixed headers for protocol 2.0 to /cygdrive/c/ardupilot/build/CubeBlack/libraries/GCS_MAVLink/include/mavlink/v2.0
Waf: Leaving directory `/cygdrive/c/ardupilot/build/CubeBlack’
Build failed
-> task in ‘uavcan’ failed (exit status 1):
{task 7696476424144: uavcangen CoarseOrientation.uavcan,Timestamp.uavcan,1010.ArrayCommand.uavcan,1011.Status.uavcan,Command.uavcan,1000.Solution.uavcan,1001.MagneticFieldStrength.uavcan,1002.MagneticFieldStrength2.uavcan,1003.RawIMU.uavcan,1020.TrueAirspeed.uavcan,1021.IndicatedAirspeed.uavcan,1025.AngleOfAttack.uavcan,1026.Sideslip.uavcan,1027.RawAirData.uavcan,1028.StaticPressure.uavcan,1029.StaticTemperature.uavcan,1040.AngularCommand.uavcan,1041.GEOPOICommand.uavcan,1044.Status.uavcan,Mode.uavcan,1110.Temperature.uavcan,1030.RawCommand.uavcan,1031.RPMCommand.uavcan,1034.Status.uavcan,1060.Fix.uavcan,1061.Auxiliary.uavcan,1062.RTCMStream.uavcan,1063.Fix2.uavcan,ECEFPositionVelocity.uavcan,1070.Command.uavcan,1071.Status.uavcan,1129.FuelTankStatus.uavcan,1120.Status.uavcan,CylinderStatus.uavcan,1080.BeepCommand.uavcan,1081.LightsCommand.uavcan,RGB565.uavcan,SingleLightCommand.uavcan,1090.PrimaryPowerSupplyStatus.uavcan,1091.CircuitStatus.uavcan,1092.BatteryInfo.uavcan,1050.Measurement.uavcan,1100.ArmingStatus.uavcan,2000.GlobalNavigationSolution.uavcan,1.GetNodeInfo.uavcan,2.GetDataTypeInfo.uavcan,341.NodeStatus.uavcan,4.GetTransportStats.uavcan,4.GlobalTimeSync.uavcan,5.Panic.uavcan,5.RestartNode.uavcan,6.AccessCommandShell.uavcan,CANIfaceStats.uavcan,DataTypeKind.uavcan,HardwareVersion.uavcan,SoftwareVersion.uavcan,16370.KeyValue.uavcan,16383.LogMessage.uavcan,LogLevel.uavcan,1.Allocation.uavcan,30.AppendEntries.uavcan,31.RequestVote.uavcan,390.Discovery.uavcan,Entry.uavcan,15.Begin.uavcan,380.Indication.uavcan,40.BeginFirmwareUpdate.uavcan,45.GetInfo.uavcan,46.GetDirectoryEntryInfo.uavcan,47.Delete.uavcan,48.Read.uavcan,49.Write.uavcan,EntryType.uavcan,Error.uavcan,Path.uavcan,10.ExecuteOpcode.uavcan,11.GetSet.uavcan,Empty.uavcan,NumericValue.uavcan,Value.uavcan,2010.Broadcast.uavcan,63.Call.uavcan,Protocol.uavcan -> }
I am using Windows 10 and installed all the files given in the link.