Hello guys,
Has anyone seen this behavior before?
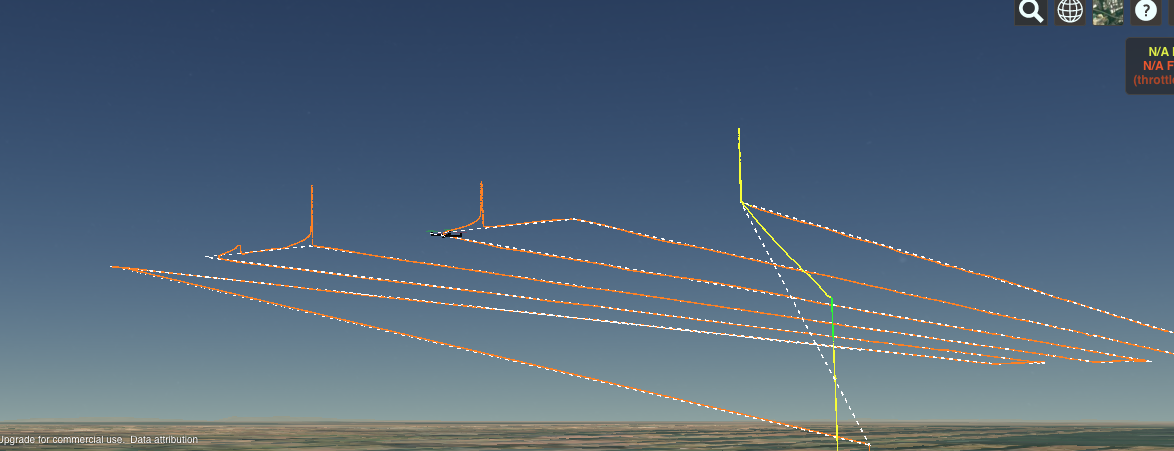
We have several drones with exactly same components, but this one is climbing 30~40 concistely at every survey mission corner.
Any clue about whats happening?
Im using Arducopter 4.0.5 (With just translated messages)
.bin LOG File
xfacta
(Shawn)
2
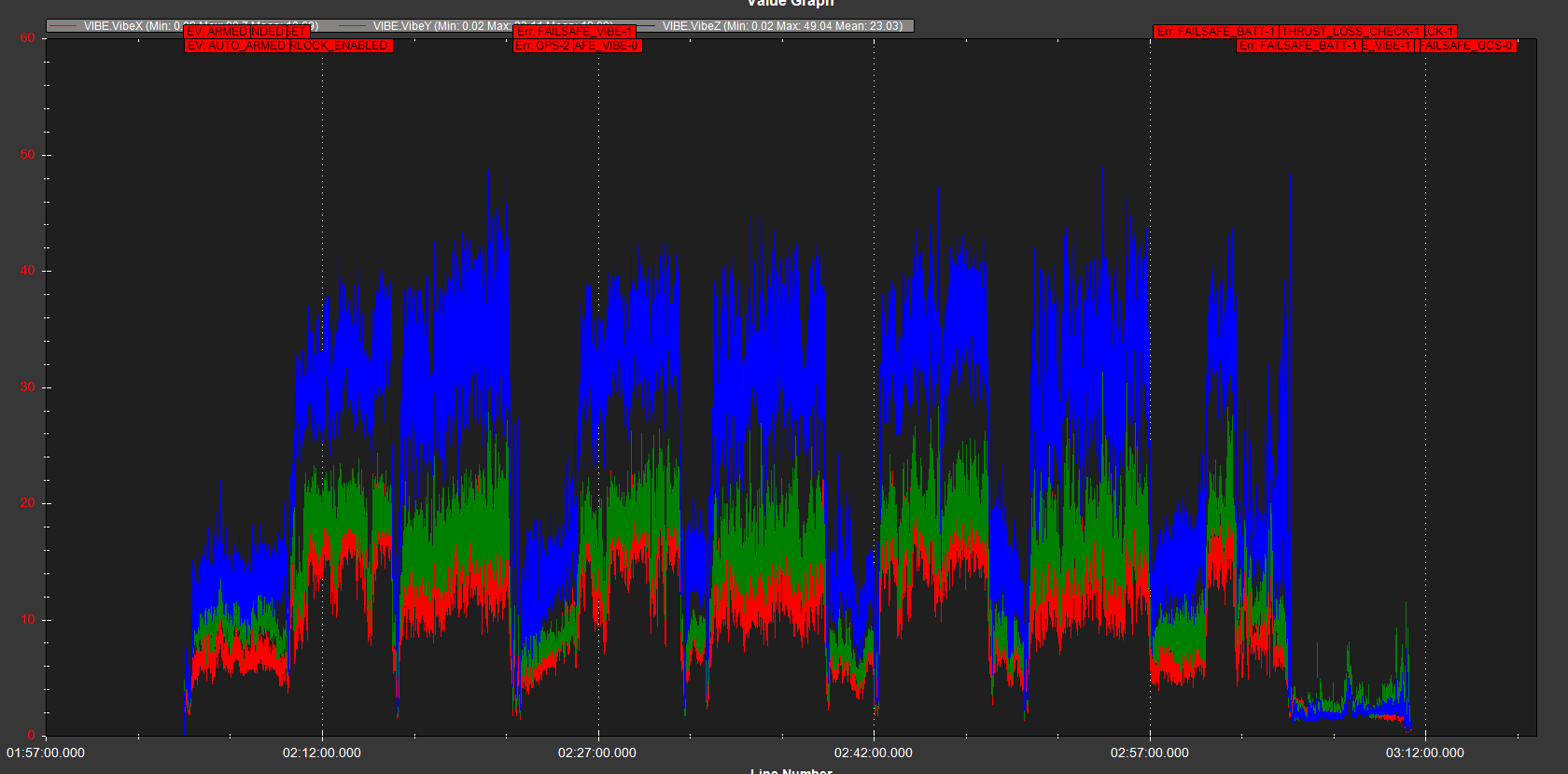
Vibration failsafe is activating - the Z axis vibrations are the cause of the climb
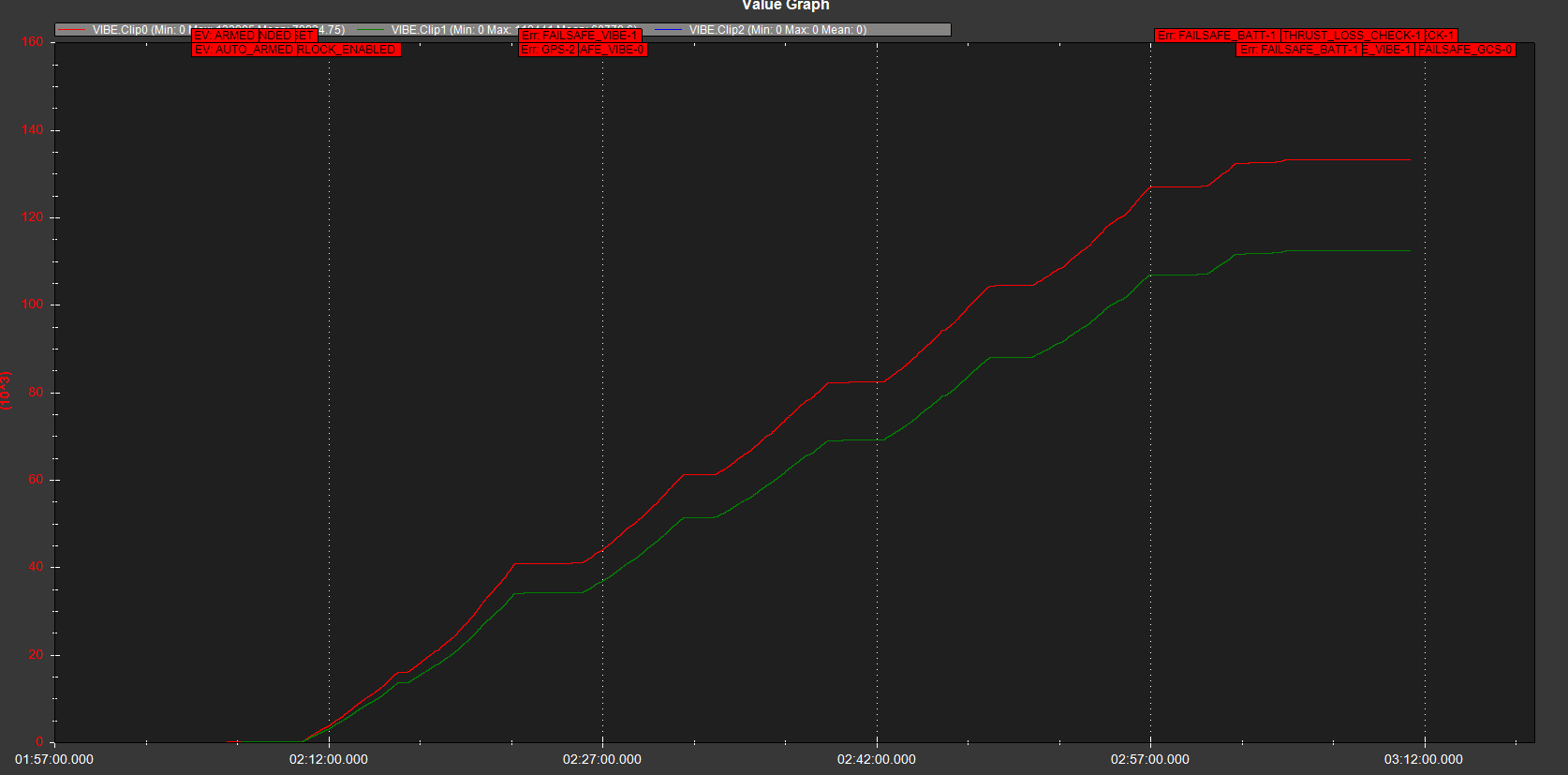
The IMU accelerometers are clipping, which means their limits are being exceeded, and so the true values won’t be showing in the vibration values.
Plenty of people say “but the vibrations are within limits” when you cant see the real values because they are beyond the range of measurement.