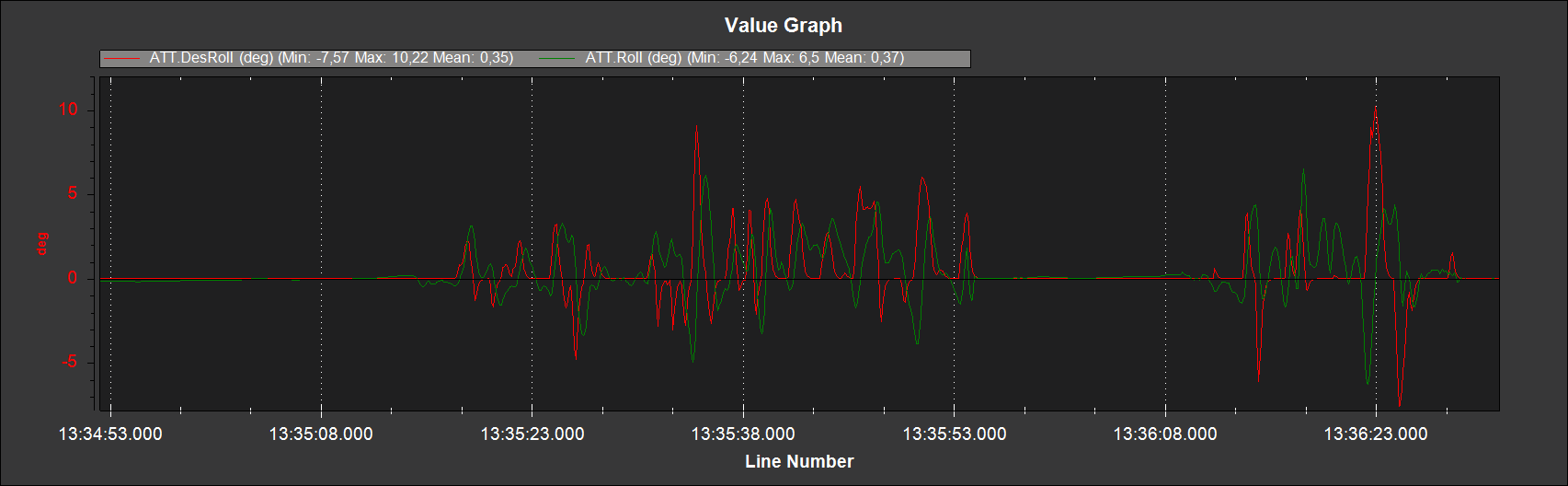
As for the first thing you are most likely right. I haven’t done much PID tuning for the moment.
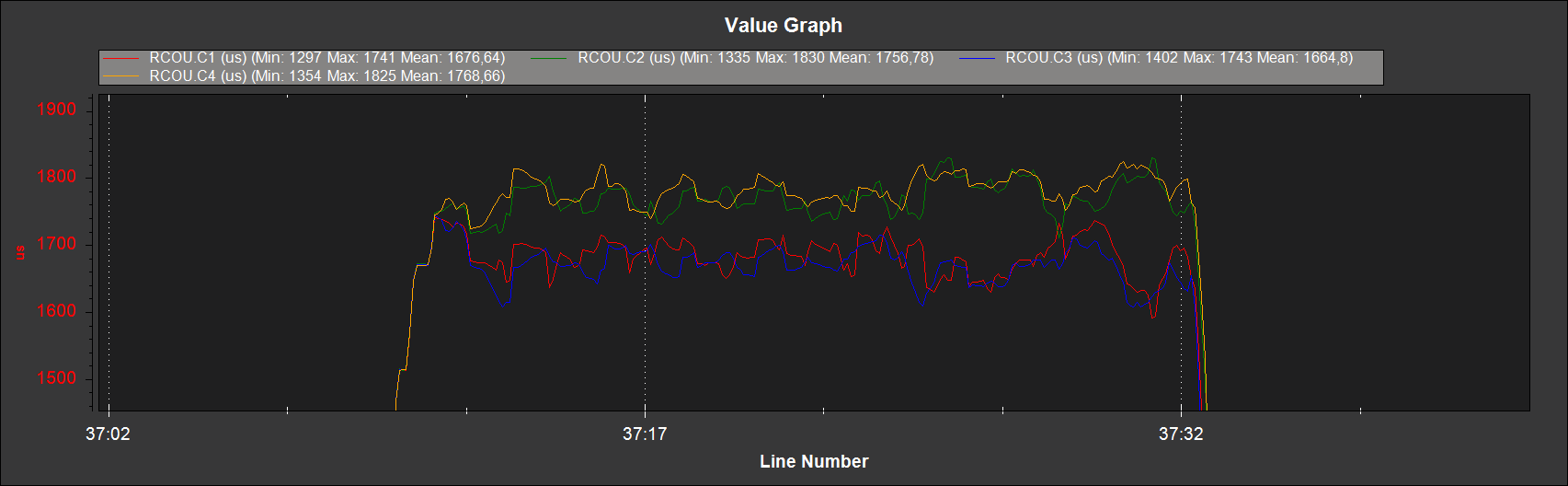
Regarding the vehicle being underpowered I must say I am not sure. The reason for this is that on the same vehicle with Pixhawk4 and PX4, it flies flawlessly and hover is about 56%. With CubeOrange and arducopter I can’t even get it stabile in stabilized or loiter mode. Can you explain what do you mean by “underpowered with high values of PWM”. I see on graph that pwm is high. Should I change PWM max and min?
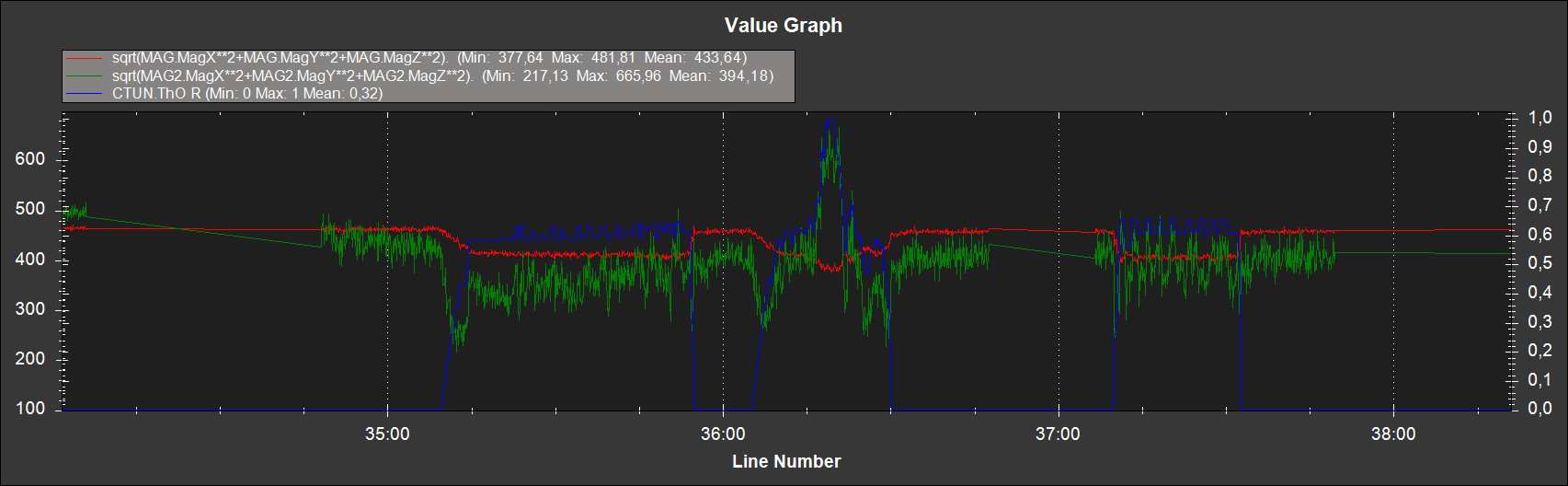
As for the mag issue, I will try placing it further away from main cables. The vehicle is powered with 12S battery (not through PDB). A small 3S battery powers FC.
I was facing similar issues due to magnetic interference on 5" quads, switching to EK3_MAG_CAL to 2 solved the toilet bowl issue, if it is not helping you then probably you need to workout with your setup and tuning first
Because your motors are between 70-80% (1700-1800us) at hovering, so you won’t have enough power to do fast movements or having a good maneuverability. Make sure that you have previously calibrated your ESC, if that is the case, the only thing you can do is to change motors or propellers.
Ideally your want the aircraft to hover at or slightly below mid throttle and your aircraft is hover well above that.
The bad part is when you consider that effective throttle ends at ~95%, once the required hover throttle goes above 50% the flight controller starts running out of head room for maintaining stable flight.
You have two choices:
Loose some weight.
Install different motors and/or props.
Having said that, before I can give you any specific advice I need to see a detailed parts break down of EVERY THING, motors, props, ESCs, battery, etc and I need to know what the aircraft Take Off Weight is to the nearest gram.
Also, you need to install and calibrate a battery monitor so we can look at voltage, current draw and so on. This component is also necessary to enable the low battery fail safe functionality.