Hello, here is a set Pixhack-2-8-4 in the T-Rex 500 the PRO, firmware version 3.3.3 So not only me at the RTL early off the engine and the helicopter fall height, and it was 3 times. Who knows the solution to this problem?
1 Like
Reduce the rate of decline, set a certain negative pitch, and then test it!
1 Like
Zhangsir thank you, but I do not really understand where you want to set a specific pitch is negative, in what place?
I noticed a strange situation firmware version 3.3.3, if you set the RTL-ALT-FINAL for example (400), then the RTL model arrives to sharpen takeoff, is reduced to 4 meters and hangs, with no problems, the motor does not turn off, I spent about 20 tests and everything is oK.
then established RTL-ALT-FINAL (0) planting, conducted tests at the RTL model arrives to sharpen takeoff, the engine shut down early and the helicopter fell (((
then established RTL-ALT-FINAL for example (400), then the RTL model arrives to sharpen takeoff, is reduced to 4 meters and freezes again, there is no problem, the motor does not turn off, I spent about 10 tests and everything is OK.
I think this is a problem in the firmware 3.3.3?
RTL-ALT-FINAL (0) settings I have repeatedly tested many times, each time the normal stability of the automatic landing success, and will use the negative pitch to suppress the already landing copter, and then locked about 1,3 seconds!
Paste a screenshot of your PID settings, heli setup settings page screenshot bar!
this is all auto video:


1 Like
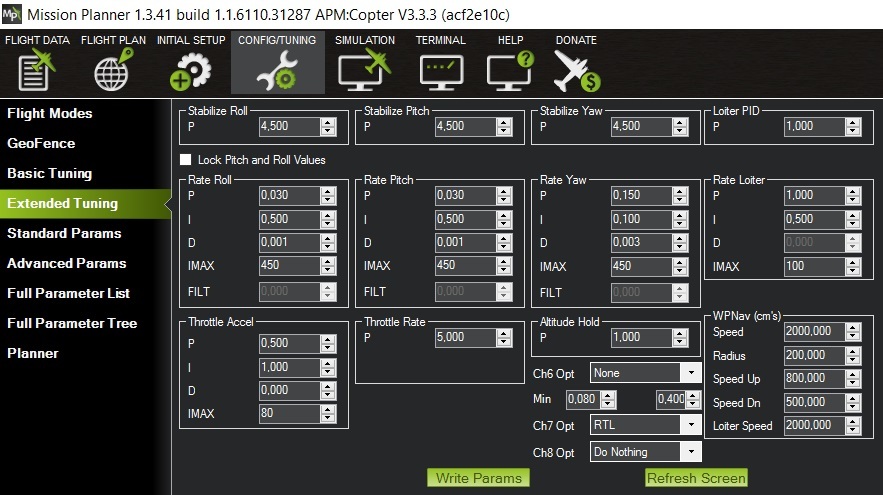

The PID does not seem to be a problem !
Zhangsir and what your PID in the T-Rex 500 PRO?
Hi guys, just an update.
Fred, there were actually other issues with 3.4, but yes, I did have an in-air shutdown. However, since then, I have discovered that it is also possible for it to happen with 3.3, as I had a crash with that. The issue is that if the H_LAND_COL is set too high, such that the copter cannot descend at the target landing rate, then it will think it has landed and disarm.
Tridge actually added further protections for this in 3.4.
I will be beginning more testing of 3.4 on my helis soon and report any findings.
1 Like
Thanks you ,Rob_Lefebvre
Looking forward to your test report!
I will also test version 3.4.2 firmware in the near future.