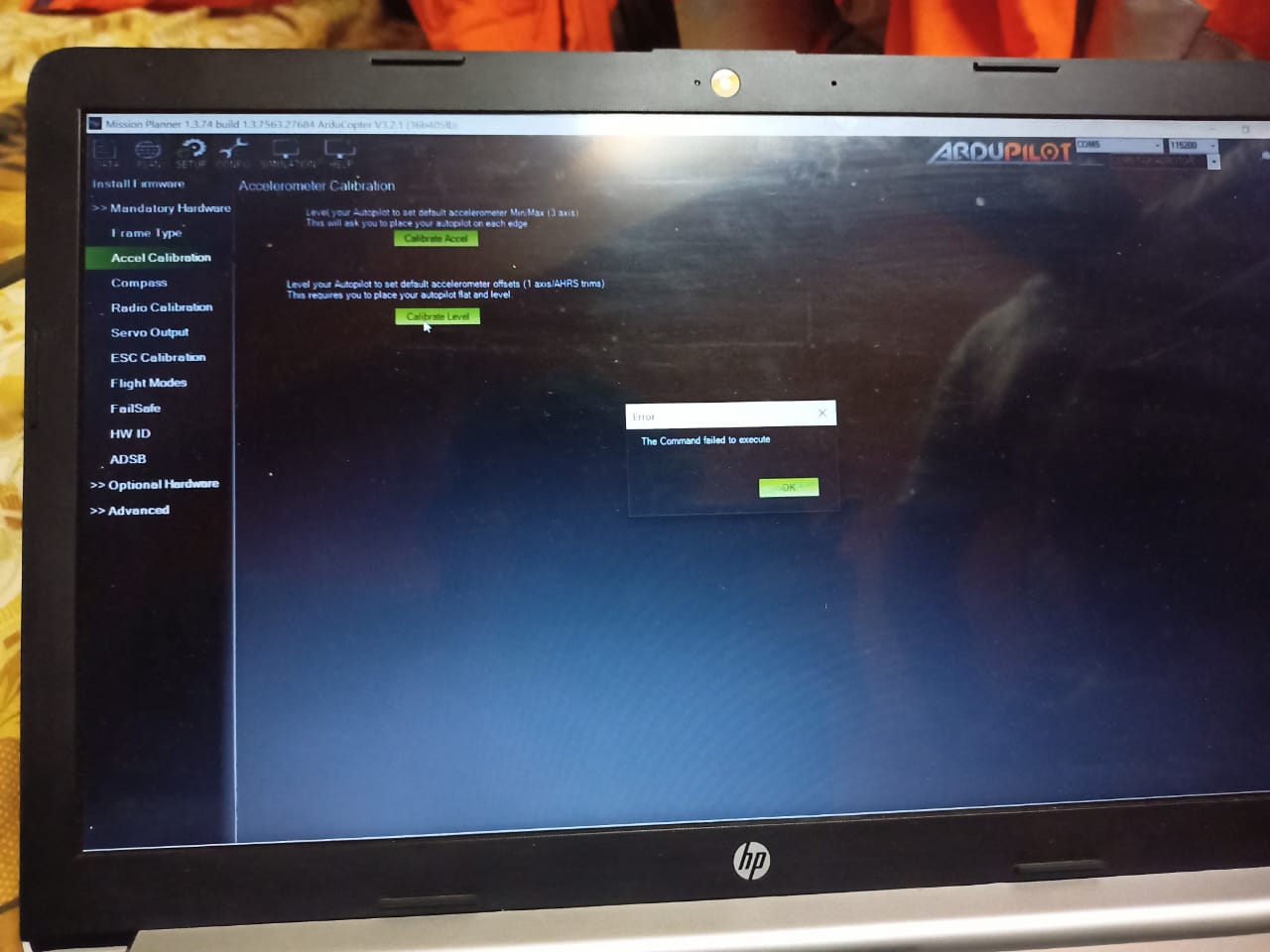
My quadcopter is not flying at high speed throttle also …throt max is 1000. Caliberation is successful but caliberate level showing is execute to fail error.
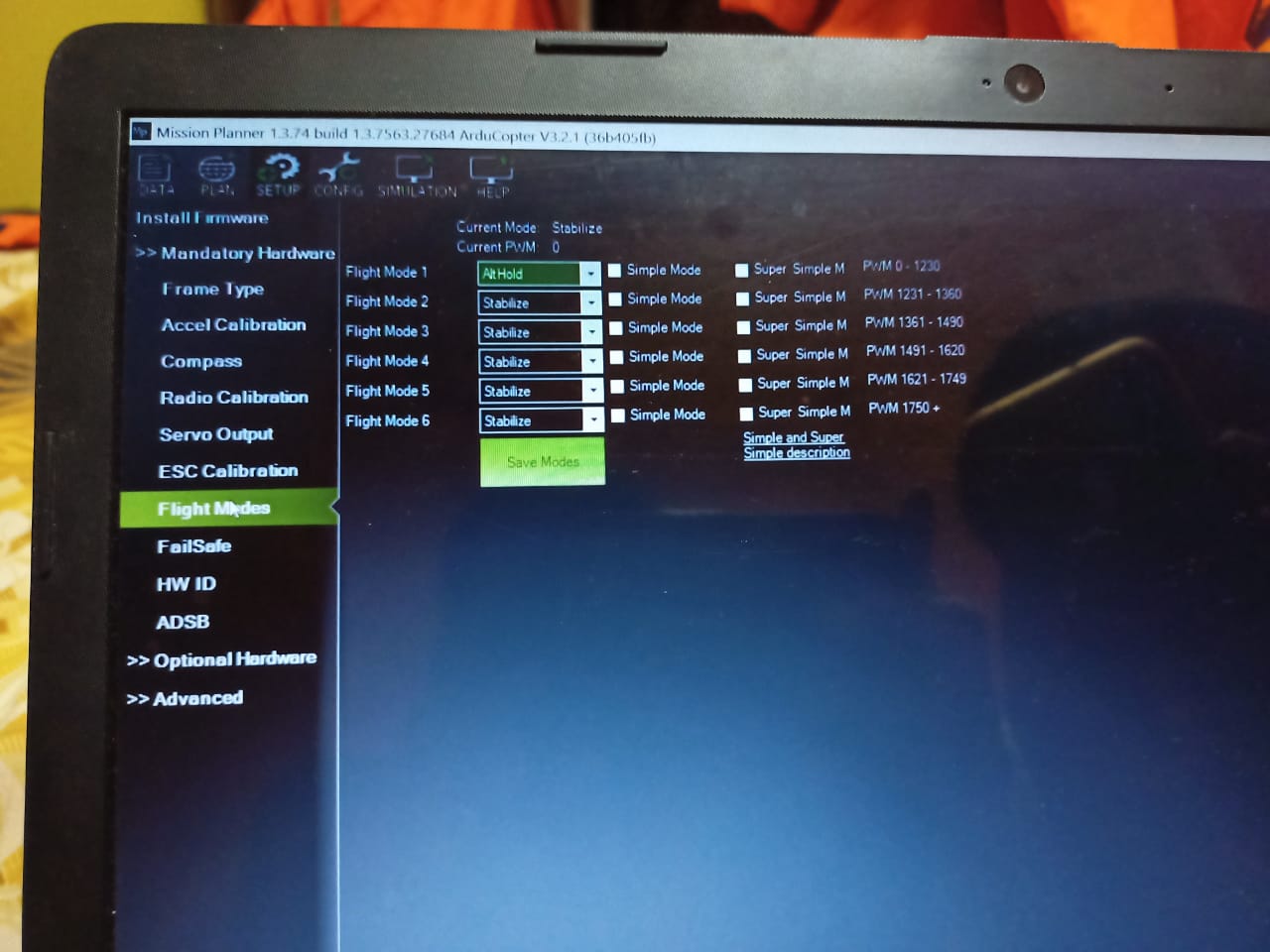
It’s a quadcopter of 1000kv of each motor without gps. Is it due to alt hold. Current pwm is not showing while setting althold…
The min throttle is typically 1000. And the max throttle is typically 2000.
It is normal that with throttle 1000 the copter does not even takeoff.
No it’s just have 1000kv motors…what can I do…pls rply
APM2.8 is old hardware and basically a ripoff. Most of the setup will not work with a recent version of Missionplanner. Install an older version of Missionplanner that fits Arducopter 3.2.1. I can not remember which version was around back then. I would try MP 1.2.xx, or so.