Superb, thanks a million
1 Like
Flashing the new omnibus worked. First stable version of arduplane with booloader (arduplane_with_bl.hex), then follows the flashing of peters antennatracker.apj by missionplanner.
2 Likes
Thanks Peter @iampete . Our test setup with a omnibus works well.
Question: Is it better to mount the compass so that it tilts with pitch or better on the rotating platform that the compass only turns with yaw ?
1 Like
glad to hear its working, you will have to mount the compass with with flight controller on the pitch axis, otherwise it will confuse the ekf.
1 Like
@iampete Hello Peter, could you please compile for me last version for pixhawk fmu v2?
thank you so much for your help.
1 Like
I’m pleased to report tracker is now built for everything on the server
http://firmware.ardupilot.org/AntennaTracker/latest/
5 Likes
I don’t see these SERVO3_ and SERVO4_FUNCTION in MP 1.3.61., as I have similar problem not able to test the servo using TEST button.
Pls help. Thank you.
I was running the AT V1.0.0.
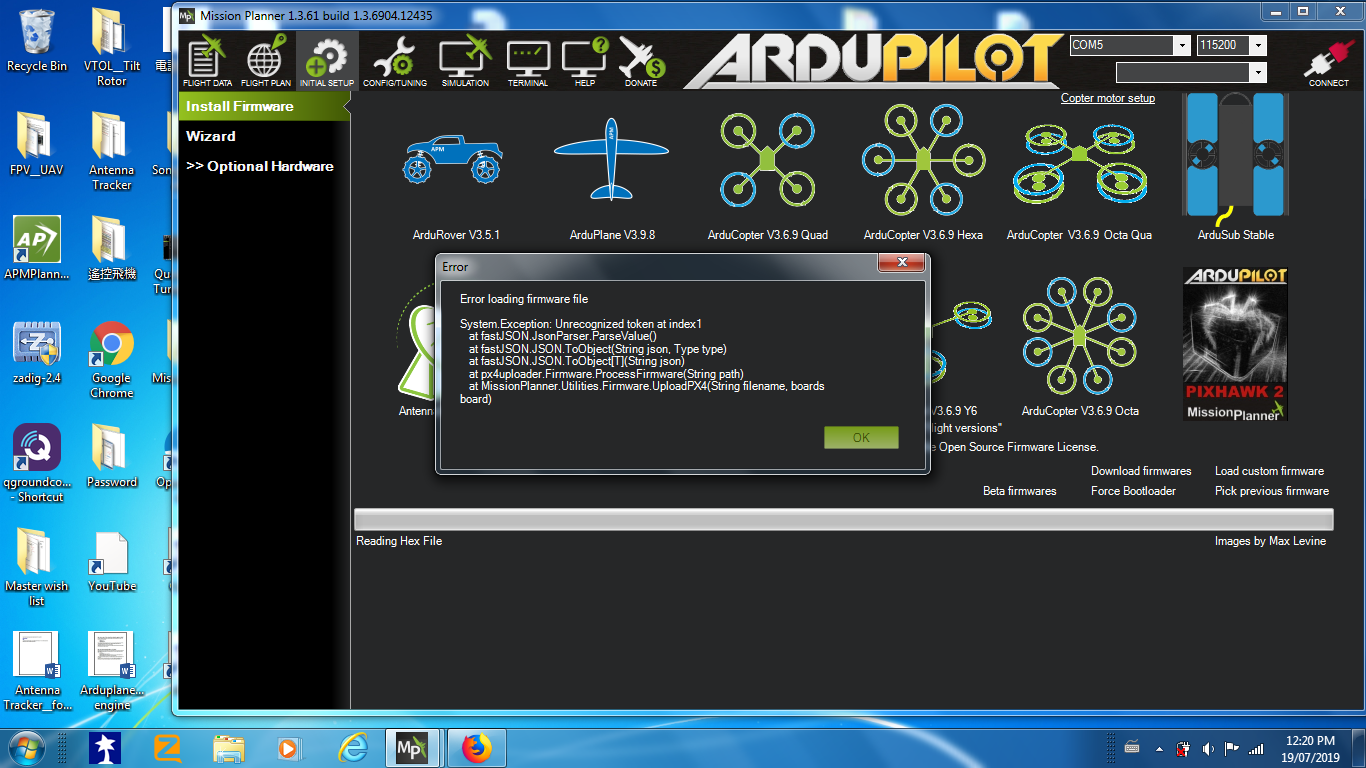
But I got the attached error message when flashing with the beta version from the link you gave. I tried the .hex FW with and without bl, for all the 3 versions of Pixhawk, 1 4 and 6. They did not work.
Before I used Pixhawk (Actually Pixhack 2.8.4), I used APM2.6 as the AT controller. The test button did work.
Pls help. Thank you.
Hello Peter,
Thank you for your support. I managed to flash the .apj fw to my Pixhack. But test button still does not work.
So I changed the default setting of SERVO1_ and _2 FUNCTION all to zero, and then assign SERVO3_FUCTION to 72 and SERVO4_FUNCTION to 71. But the result is the same.
With this beta version, I cannot even check the REVERSE box, which seems inactive.
I am using Windows 7. I may try later with another PC running Windows 10.
Do you get your AT running without problem ? Do you use any setting in MP other than the default setting ?
Thanks.
you will have to have turned off the satey switch with BRD_SAFETYENABLE ? or fitted a safety switch and pressed it. The test button will only do anything when your armed and in SERVO_TEST mode.
Thanks Peter.
I was in Servo test mode as shown in HUD of MP. Pls see attached.
BRD_SAFETY was also enabled (set to 1).
I also armed the tracker as heard by the long beep.
All these did not change anything until I changed the SERVO1_ and SERVO2_ FUNCTION to 72 and 71 respectively, (SERVO3_ and SERVO4_ changed back to 0), then the test button now works.
I have been working on this project for nearly 3 years, on and off, without success. I followed the wiki to the word, seems the description does not work. As you can see from the attached screen shot, I have both the quad and the tracker appear in MP, meaning the tracker got the position data from the vehicle, but the tracker servos refuse to move, even though I fly the vehicle above the tracker. I don’t have clue as to why it does not work, for 3 years.
Is your tracker working ? Any custom setting in MP, different from the default setting ?
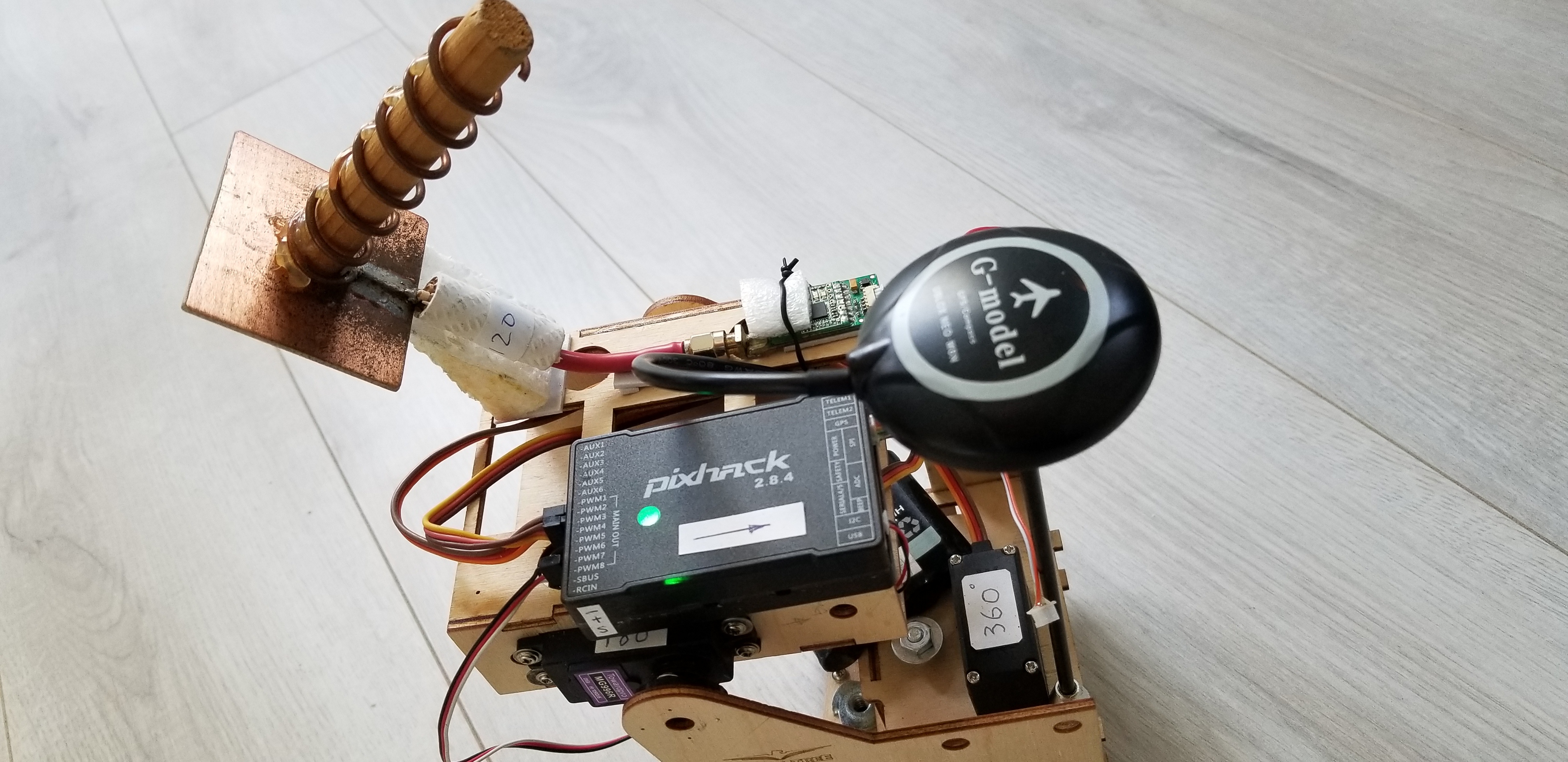
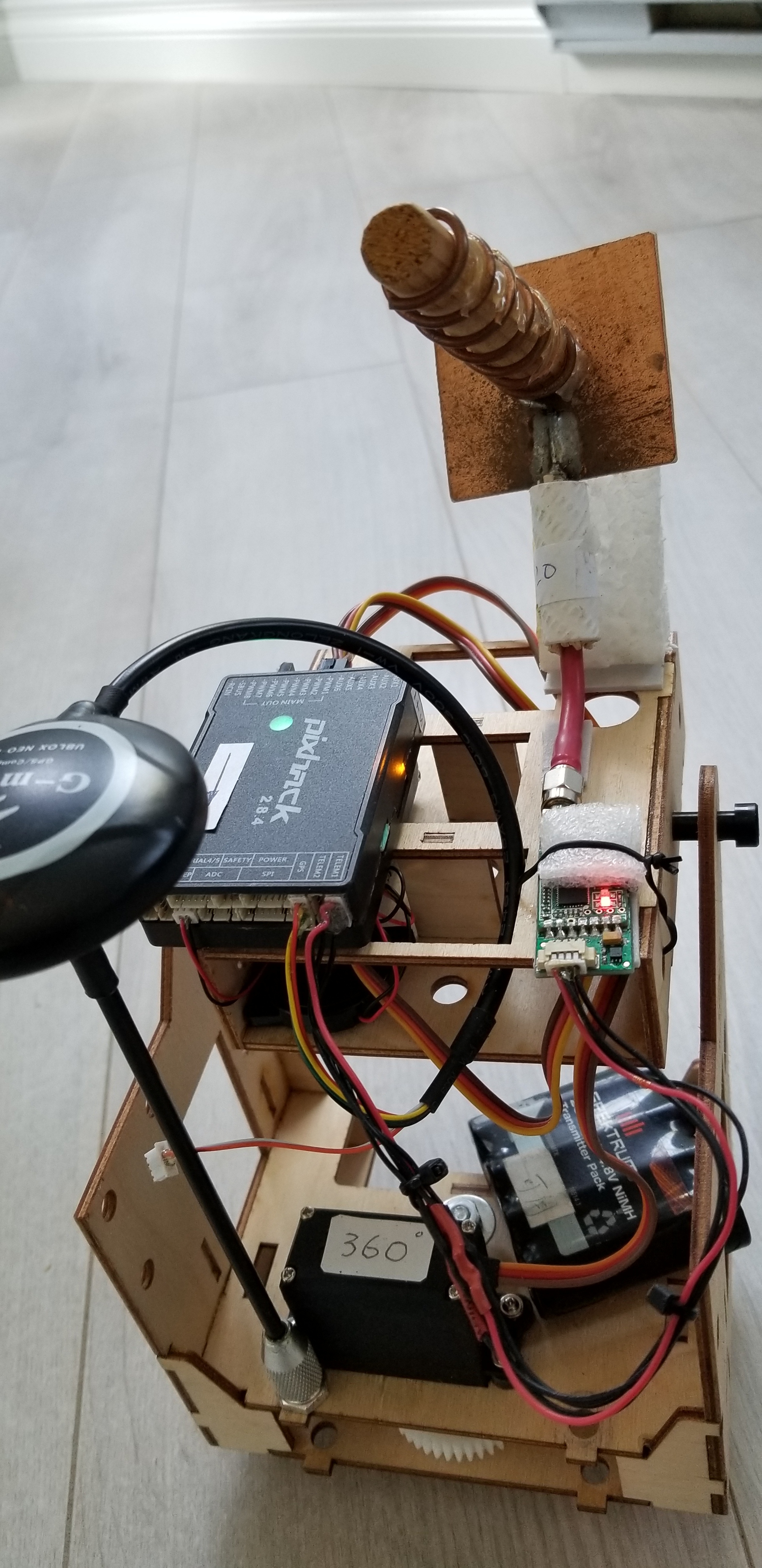
Pls see the 2 attached photos of my set up.

the new beta definitely works.
Looks like tracker can see the quad at least, its got the orange line pointed at it, note that just because mission planner can see it doesn’t mean tracker will track it, but it looks like your OK in this case. I guess the quad is further away than what you have set for the minimum distance?. If your still on the default the quad is outside the radius in the screen grab anyway.
Hard to help anymore without a dataflash log off the sdcard and/or a tlog from mission planner.
edit: you will need to be AUTO mode to track. have you tried scan mode? would show that the servos ect are working.
I set the minimim distance to be 2 meter, so I can move the vehicle indoor by more than 2 meters from the tracker, still the 2 servos did not move, even though the tracker is in AUTO mode.
I also changed to SCAN mode with the same result.
I am still struggling with the test button…yaw is OK, but when I push the PITCH test button, both the pitch and yaw servos move. I swap the servo wires to the controller, and also swap the 71 and 72 setting. All these did not help. Do you have any clue ?
Thank you for your continued support.
BRD_SAFETYENABLE should be 0. If that doesn’t fix it I will need logs to further diagnose.
I can have the DF log downloaded from my quad or plane, but not on Antenna Tracker. Still figuring out.
I used to have the **.**param file downloaded few years ago, but now it is changed to DF log.
Will provide you with the DF log as soon as I get it.
Thank you again.
Hello Peter,
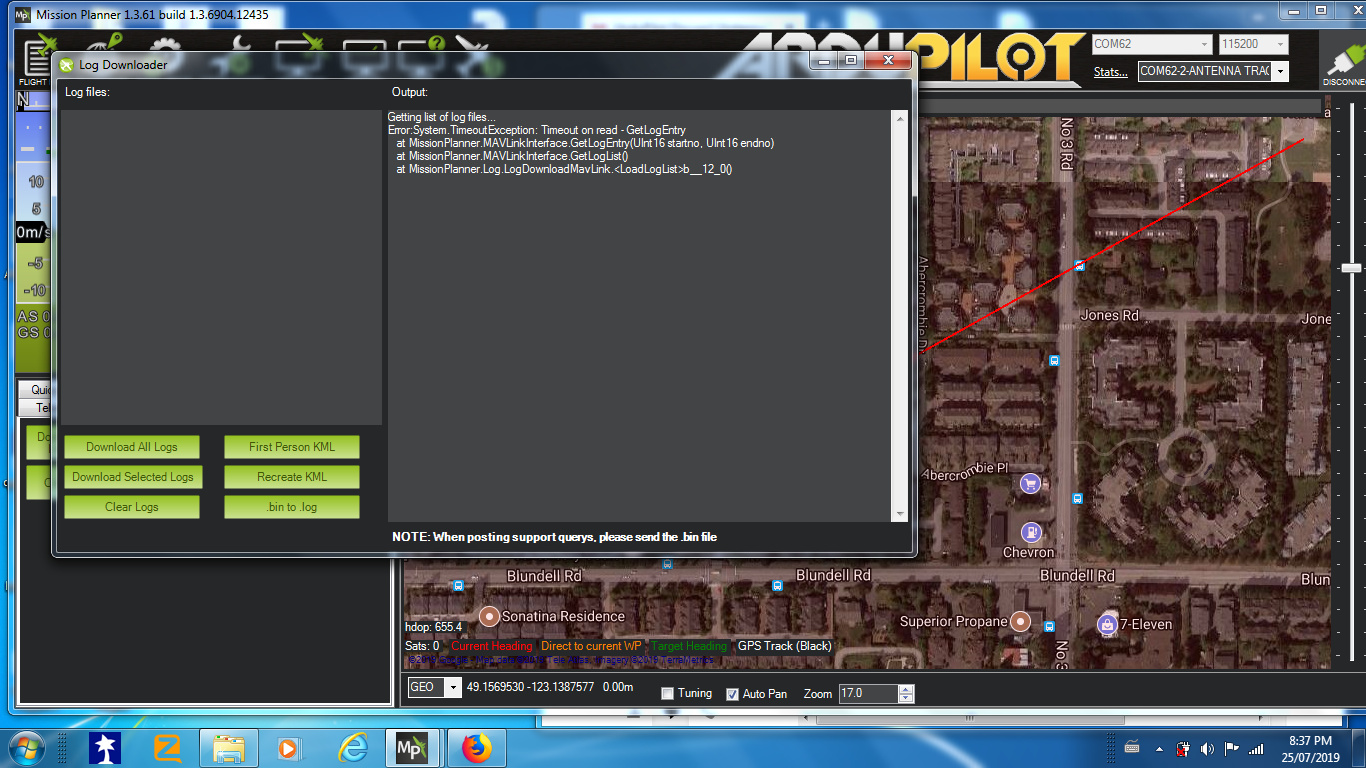
I still can’t download the DF log via Mavlink. See attached. Instead, I removed the Sd card from Pixhack and copy the binary log to my PC. See attached.
Hope this helps to diagnose why when I ets the Pitch button, both the pitch servo and the yaw servo move. Yaw button is OK.
Thanks for your help.
Frankie
00000155.BIN (1.02 MB)
The issue may be that we don’t allow downloading of logs while the vehicle is armed and trackers may always be armed…?
Your BRD_SAFETYENABLE is 1, it should be 0
@rmackay9 is correct, you will need to be disarmed to download a log, either by toggling the arming state in mission planner or switching to stop mode