I’ve built the antenna tracker firmware for the Matek F405-WING and uploaded it to the board.
Upload seemed to go well and all the antenna tracker specific parameters are showing in the parameter tree. However, the servos don’t move. I’m not actually sure what signal pins the servos should be connected to but I tried a servo on each pin and they never moved.
Does anyone have any experience of getting the antenna tracker firmware to work with this board?
I’m just trying to test the servos at the moment, using the test button on the extended tuning page in Mission Planner. Just figured out the signal pin - S1 & S2 are where the signals are being outputted. How easy is it to change to S3 & S4 as S1 and 2 don’t have a 5V pin for the servo next to them whereas 3 and 4 do. I tried changing the channels in config.h but that didn’t seem to work.
Unfortunately, there are current Tracker versions on the firmware server only for the Navaio hardeware. http://firmware.ardupilot.org/AntennaTracker/latest/
The last Pixhawk beta version is from 2016. Versions for the new boards would be great.
Flashing the new omnibus worked. First stable version of arduplane with booloader (arduplane_with_bl.hex), then follows the flashing of peters antennatracker.apj by missionplanner.
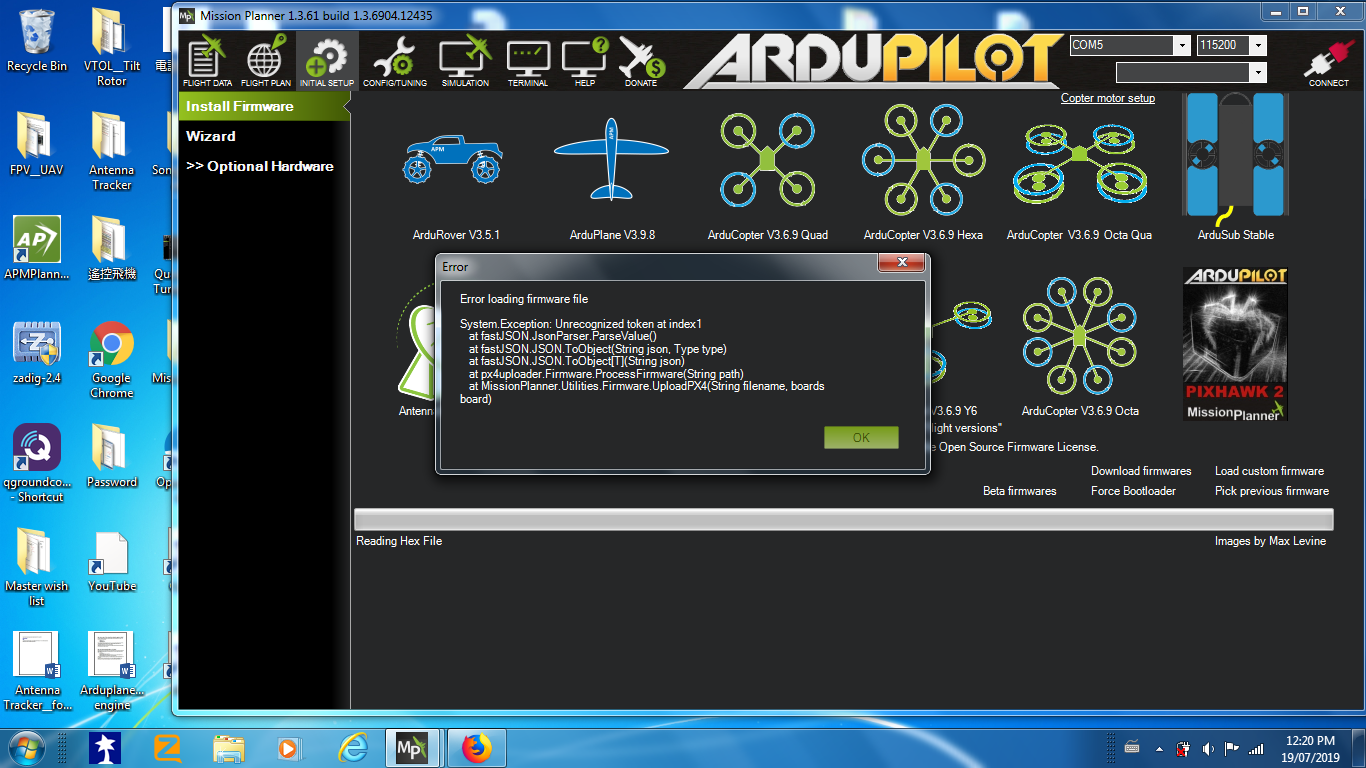
But I got the attached error message when flashing with the beta version from the link you gave. I tried the .hex FW with and without bl, for all the 3 versions of Pixhawk, 1 4 and 6. They did not work.
Before I used Pixhawk (Actually Pixhack 2.8.4), I used APM2.6 as the AT controller. The test button did work.
Thank you for your support. I managed to flash the .apj fw to my Pixhack. But test button still does not work.
So I changed the default setting of SERVO1_ and _2 FUNCTION all to zero, and then assign SERVO3_FUCTION to 72 and SERVO4_FUNCTION to 71. But the result is the same.
With this beta version, I cannot even check the REVERSE box, which seems inactive.
I am using Windows 7. I may try later with another PC running Windows 10.
Do you get your AT running without problem ? Do you use any setting in MP other than the default setting ?