@Leonardthall I flew with your most recent build (extra logging). Here is the log file and the parameters saved fresh just before flight (nothing should have changed, but just in case).
I flew with and without surface tracking enabled, mostly in loiter but at least once in alt-hold. It felt slower on ascent and descent for some reason, all around. It could have been my imagination, or it could have been a result of a 5-10 mi/hr headwind making it work harder for attitude. I don’t have time at the moment to compare the logs which would answer that question for sure. Stabilize mode didn’t feel any different. It’s also about 20 degrees hotter right now, maybe the density altitude is higher as a result. We’re already at 7200 ft AMSL as it is.
However I did not notice the issues with overshoot nearly as much this flight. That might be a result of the more sluggish ascent/descent, not sure. Are you sure you didn’t make additional improvements since the previous beta build?
If you could revert to Copter-4.0.7 and give it a test that would be a great help actually but like everything else it is optional! I think I’d better give it a try myself as well!
EDIT: I’ve tested surface tracking with -rc1 and it seems pretty good to me. I don’t think you really need to go back and re-test with 4.0.7.
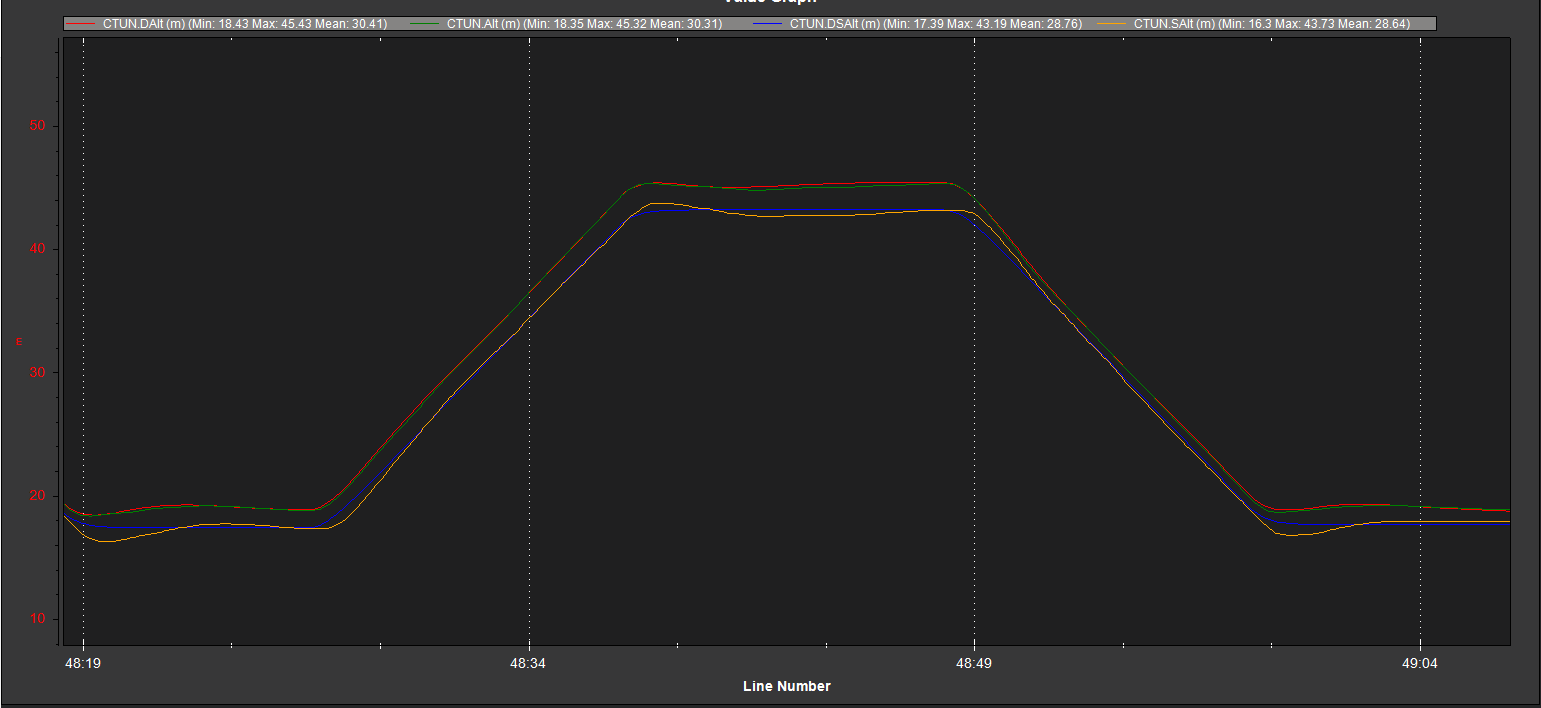
I don’t believe so. The logs are all doing the right things. It looks like there is a small delay in the radar range finder. It looks like it is just a little more than 0.25 seconds.
This is expected and could be caused by a number of things including how flat the ground is vs the roll and pitch angle, radar beam alignment, EKF accuracy, and sensor scaling. Some of these things will be more noticable if you are climbing or descending faster.
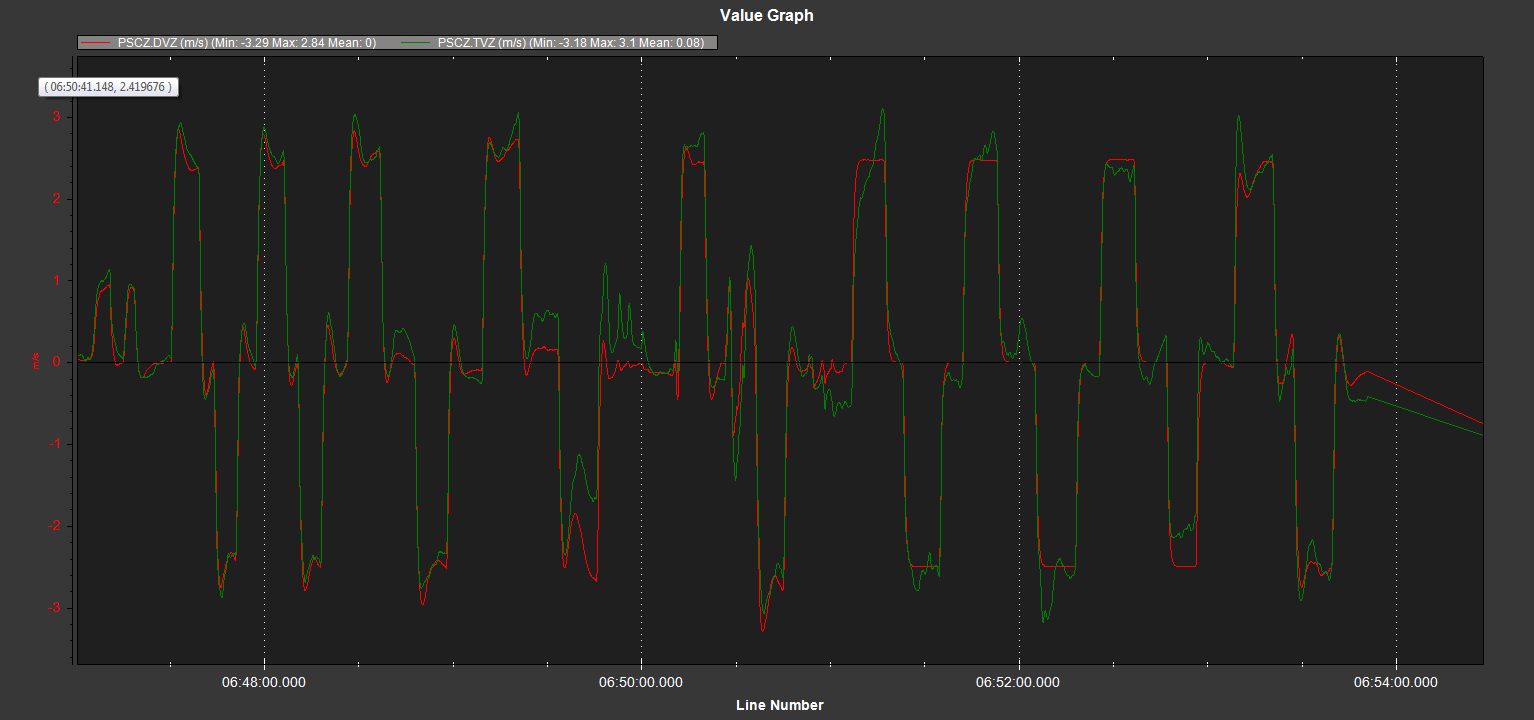
No, you were getting what you asked for and you were asking for the same thing up and down.
You can see here the classic delayed response from the range finder on the leading edge when it is enabled too.
Thanks @CBwintertime for all your help. I think we are in a good place! We will look into the delay in the range finder sensor a little more too. In particular the LW20 Lightware lidar.