Hi, I’m using a drone copter from Harris Aerial H6. We did flight planning using Mission Planner 1.3.74 build 1.3.7592.19922. We use relative height. The problem arose when we imported kml which already had altitude information (we flew 100 m with local DEM reference). all the relative altitudes match, until we find the altitude that should be -2, but in the mission planner it says 100. There are some points that require us to fly minus the home point. Is there something that must be set in the mission planner so that the minus altitude doesn’t change to 100?
What is WP_NAVALT_MIN in your parameters?
https://ardupilot.org/copter/docs/parameters-Copter-stable-V4.0.3.html?highlight=wp_navalt_min#wp-navalt-min-minimum-navigation-altitude
Dear Mustafa Gokce,
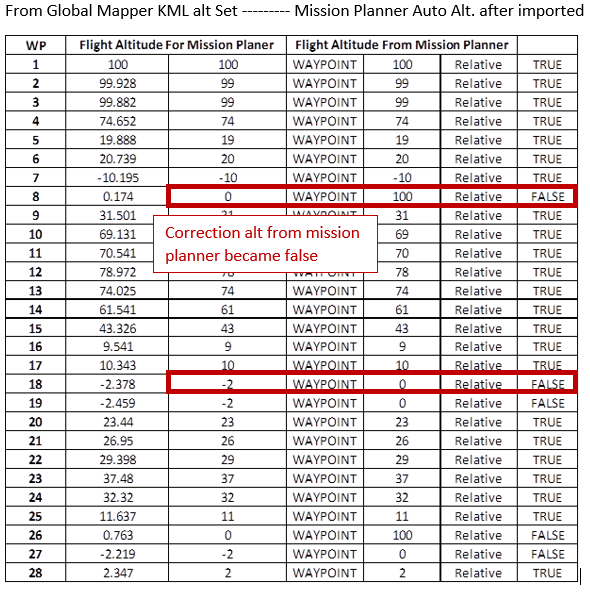
For now I can’t connect to the drone. But the information I can show is the following image. The left column is the altitude table with a flight height of 100m relative to the home point, which we set in the global mapper. the right column is the altitude which is automatically input when loading kml in the mission planner. this is one of the lines that we sampled, there are still many altitudes that the mission planner converts from alt 0 to 100, and -2 to 0. Why only the alt 0 and -2 are becoming false mission planner altitude? You can see the -10 on kml are -10 on mission planner
WP Northing Easting From KML Alt On Mission Planner Alt
1 -3325,402 3915,15 100 100
2 -3323,408 3915,604 99,928 99
3 -3322,14 3915,893 99,882 99
4 -2627,273 4074,207 74,652 74
5 -1899,164 4240,094 19,888 19
6 -1929,588 4203,223 20,739 20
7 -2051,283 4055,738 -10,195 -10
8 -2112,131 3981,996 0,174 100
9 -2206,643 4134,563 -2,378 0
Hi Mustafa Gokce, The Value was 0