I use copter 3.5.7 with 13kg quadrotor designed for carry load of 10kg for sprayer application.
I experience once in a while (not all the time) altitude drop without any reason.
At the time of happening, there is almost no load. So, the power of the copter is very overpower.
I experience this both with lidar and without.
with lidar - I experience once in Loiter mode.
with barometer - I experience it twice in Alt hold mode.
And I cannot really exactly reproduce, it is randomly happen.
From the log, I see
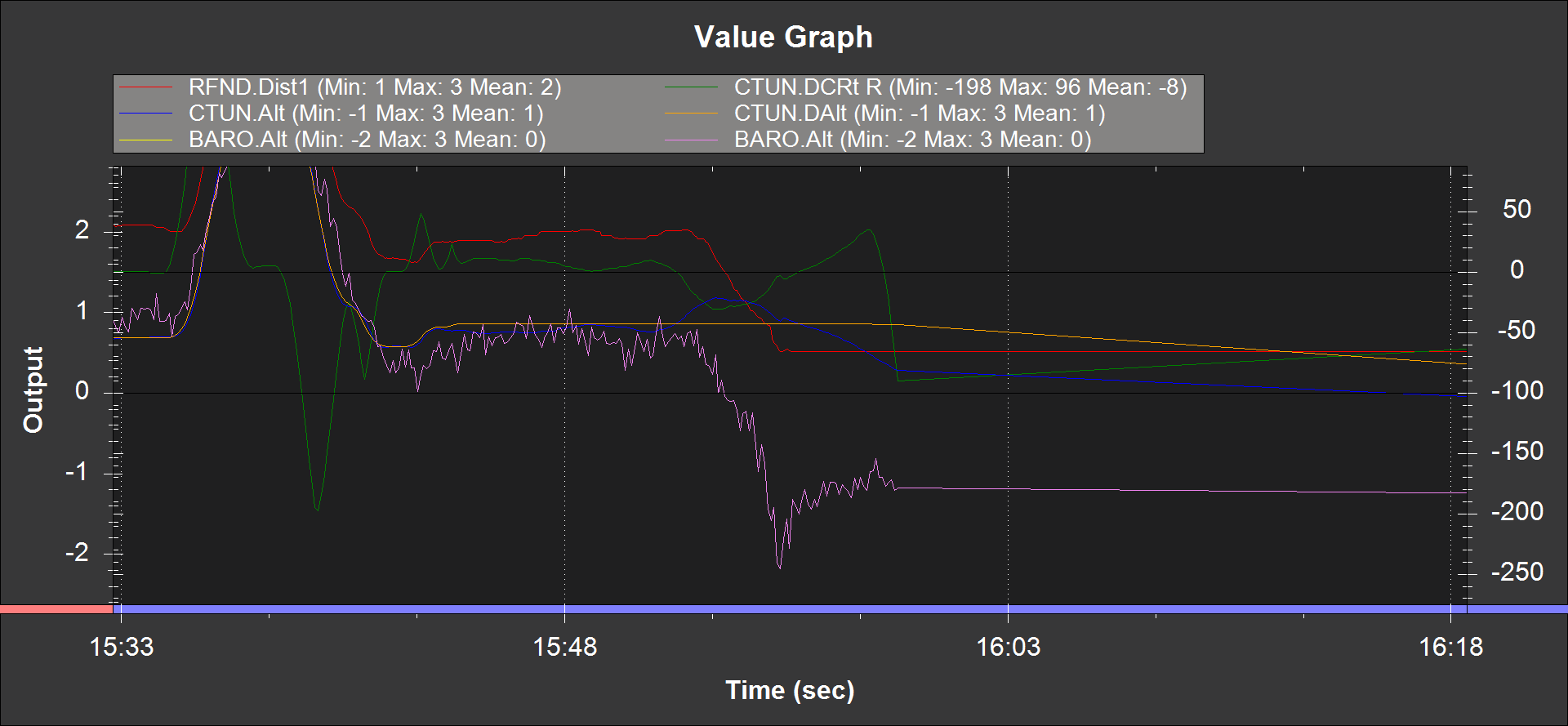
The barometer and lidar detect correct altitude.
But the CTUN.DCRt go negative without any reason at the point of sudden altitude drop.
So, the rotor go down.
We did not give any input to lower it.
In the flight with lidar, when I see the altitude drop, I boost the throttle up to compensate it.
But in the flight with barometer, the altitude drop make the vehicle get down and is already on ground, so, I disarm it.
Note that: the zoomed time is quite not correct, but this is the graph at the incident
The lidar flight, the incident is at 15.18
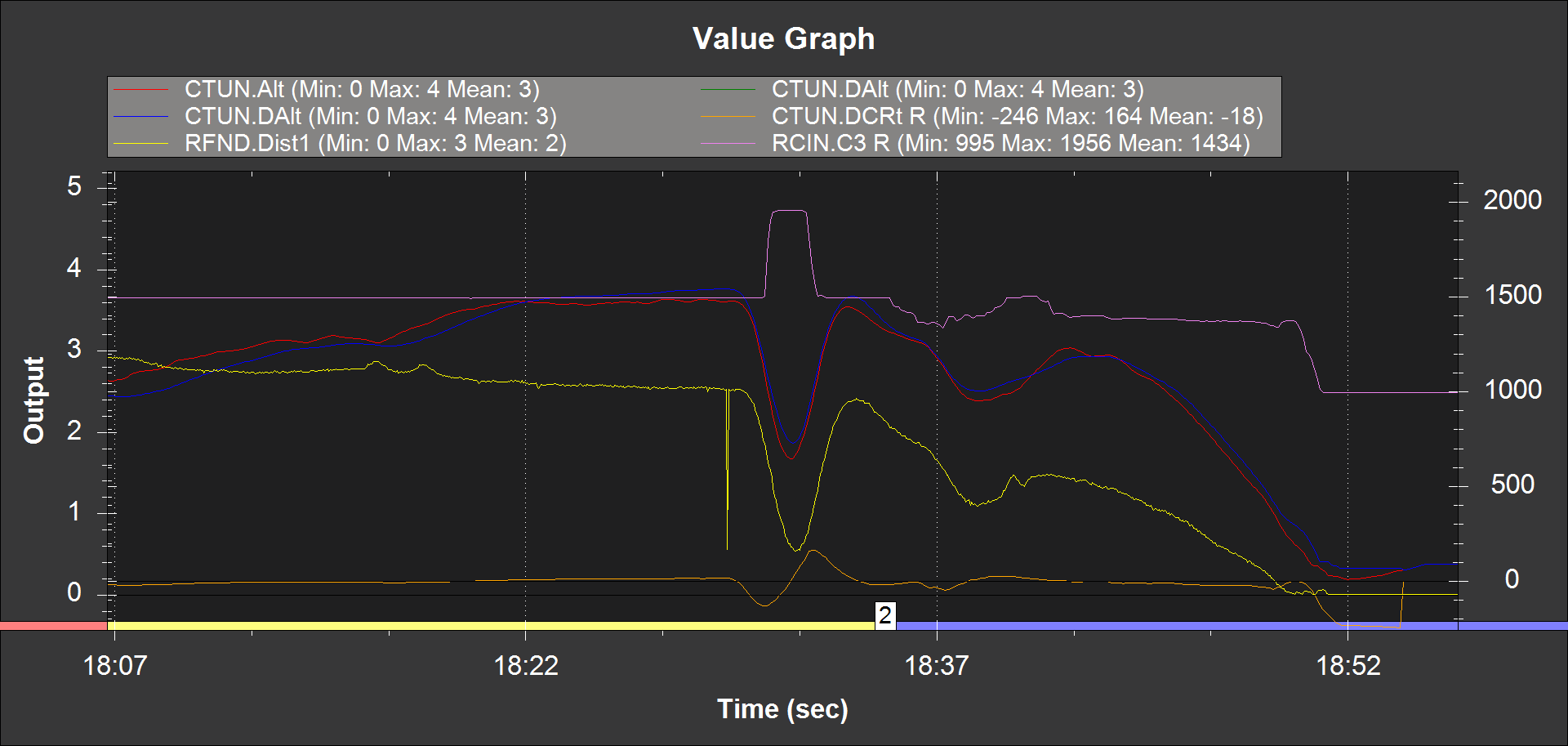
The barometer flight, the incident is at 14.15