Hi,
I was under the impression that ALT_HOLD did not use GPS data when EK2_ALT_SOURCE is set to 0 (barometer).
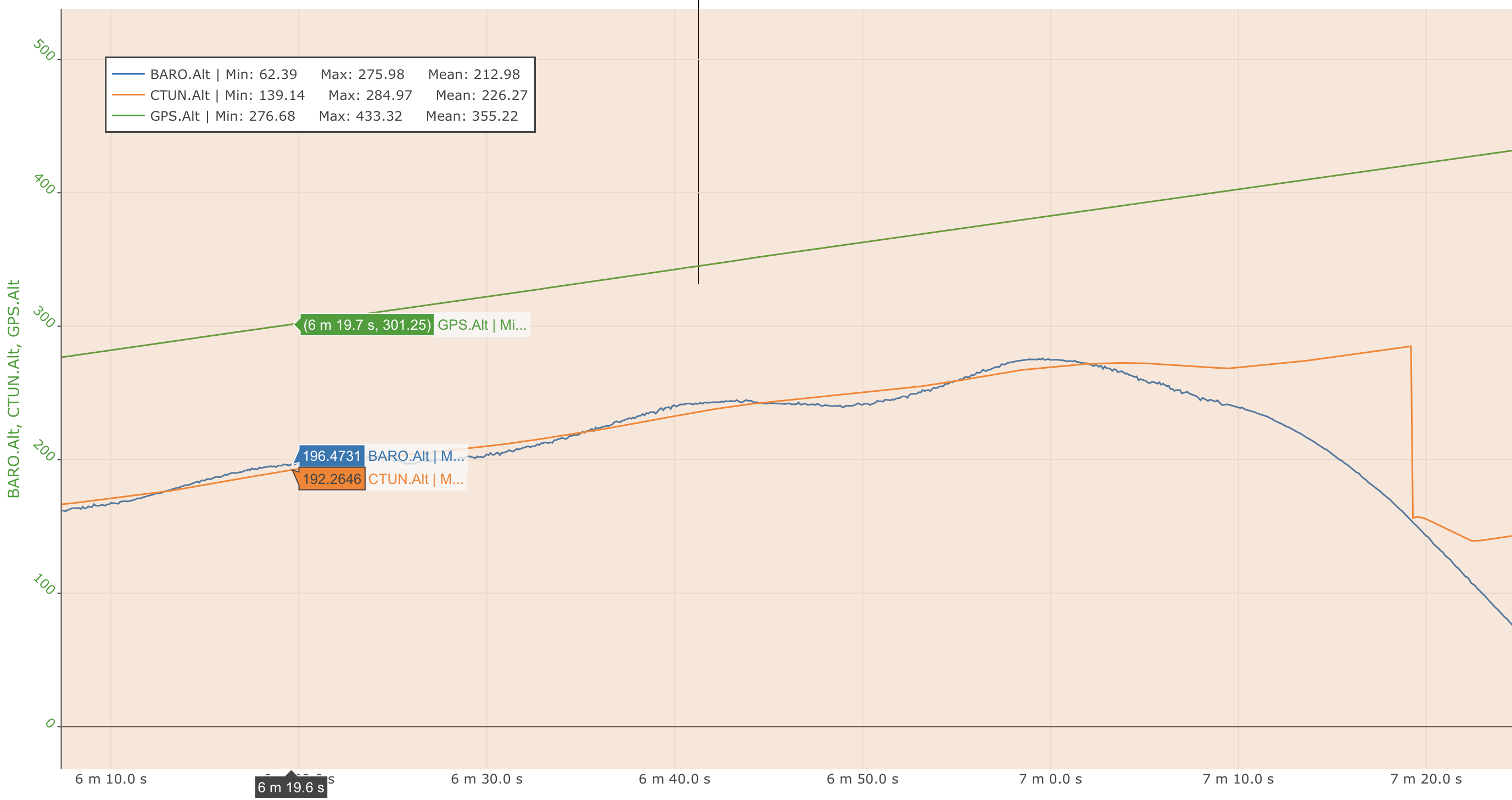
However, in the log from a recent flight I noticed that part way through the flight, the flight controller believed altitude value appears to start to follow the GPS value for a period, instead of the barometer. It then corrected to match the barometer reading at large intervals.
In this case the GPS altitude is incorrect, and the barometer was actually more accurate.
I also have AHRS_GPS_USE = 1, which does not include GPS for height (although I am not totally sure if this is relevant).
This log was taken using Arducopter 4.0.3 running on a Cube Orange.
Can anyone clarify in what way ALT_HOLD uses GPS data when both GPS and barometer are available, but barometer is set to be the primary altitude source?
Am I just analysing the log incorrectly, and GPS altitude is not what is causing the difference between barometric and believed altitude?
There is a picture of the relevant section of the log below.
Thanks!