As Dave said, check the motors are all aligned properly.
Pre-flight calibration is performed automatically anyway and shouldnt have any effect by running it manually unless temperature has radically changed before takeoff.
You have many defaults and there needs to be more tuning.
Connect to MissionPlanner and do the Initial Parameters settings.
Then check through the tuning guide
https://ardupilot.org/copter/docs/tuning-process-instructions.html
and set up the Harmonic Notch Filter
https://ardupilot.org/copter/docs/common-imu-notch-filtering.html
then run Autotune
These some parameters you can use as a starting point (in addition to the Initial Params) although an F450 frame can be very hard to tune due to the flexibility
INS_LOG_BAT_MASK,7
INS_LOG_BAT_OPT,0
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_ATT,40
INS_HNTCH_BW,40
INS_HNTCH_FREQ,80
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.28
ATC_ACCEL_P_MAX,85000
ATC_ACCEL_R_MAX,85000
ATC_ACCEL_Y_MAX,16000
ATC_ANG_PIT_P,12
ATC_ANG_RLL_P,12
ATC_ANG_YAW_P,6
ATC_RAT_PIT_D,0.00625
ATC_RAT_PIT_I,0.1
ATC_RAT_PIT_P,0.1
ATC_RAT_RLL_D,0.00625
ATC_RAT_RLL_I,0.1
ATC_RAT_RLL_P,0.1
ATC_RAT_YAW_I,0.08
ATC_RAT_YAW_P,0.8
These PIDs can depend very much on your motors, props and ESCs so just be cautious at first and try to take off and hover for a while, maybe only gentle movements if any at all.
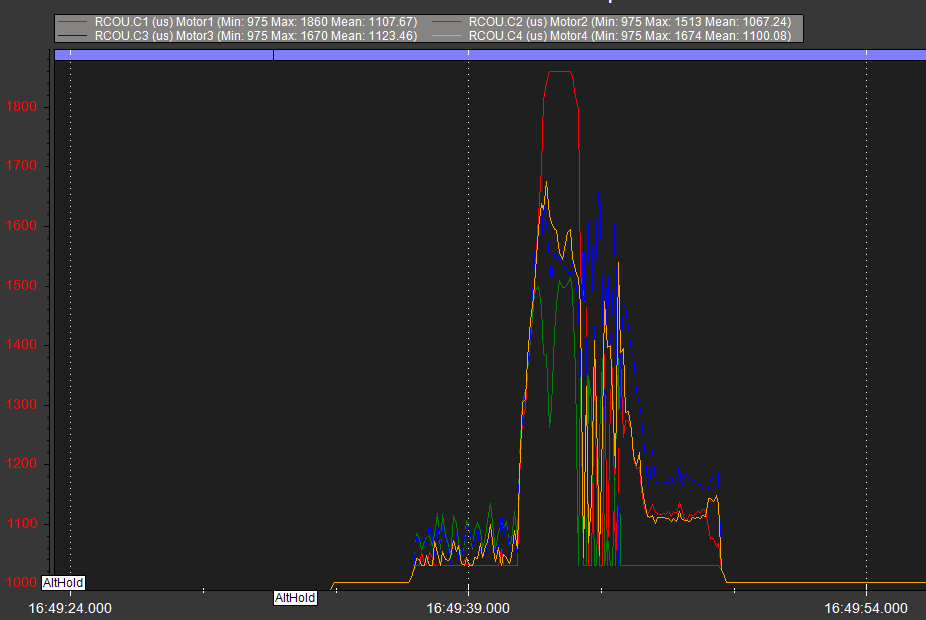
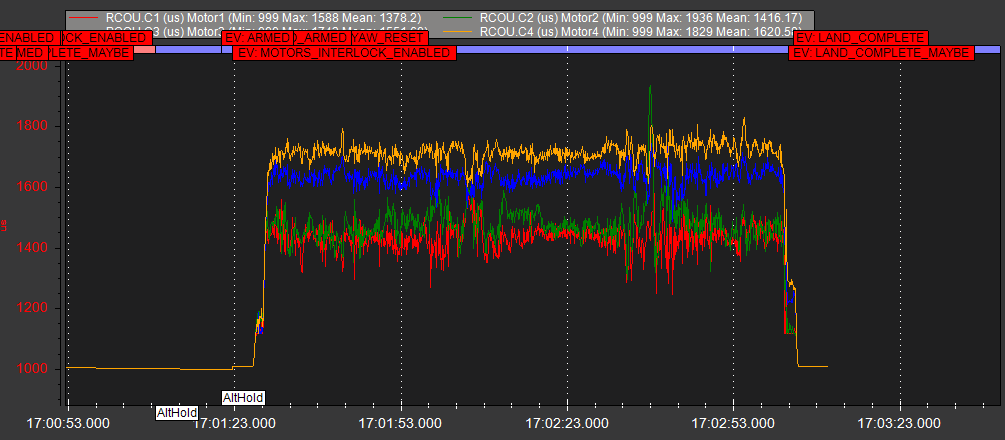
Let’s see the .bin log file from that and we can set the Harmonic Notch filter better before moving on.