I have a Matek F765-Wing in a Reptile Dragon 2 running Arduplane 4.2.0dev firmware. I have limited experience with Arduplane in the past, just a couple of basic builds with no compass or airspeed sensors using Matek F405-Wing boards. At the advice of a friend that’s much more knowledgeable with Ardupilot than I am, I set up a compass on the plane and added an airspeed sensor. After much frustration with the compass (randomly “missing” sensor, headings being way off what they should be, unable to arm due to unhealthy compass,etc.) I disabled it and decided to focus on the airspeed sensor for now. (FYI, replacing the wiring and the whole GPS/compass module didn’t help, still haven’t figured out the issue with the compass)
So I installed a 4525DO type digital airspeed sensor from 77RC, connected to I2C. It appears to work, but I’m getting a very erratic reading from it. The synthetic airspeed seems much more stable and maybe even more accurate. That said, I’ve never used an airspeed sensor with Arduplane in the past, only one of my planes has one with a Vector flight controller.
On this flight, I have the airspeed sensor type set, but am not “using” it for navigation. I have calibration turned on, that was the goal of this flight to get the sensor calibrated and start using it after.
I’d appreciate it if someone more experienced and knowledgeable than me would look at the logged reading and see if this looks normal, or if there’s a problem that I need to sort out. I’m also wondering if there’s an issue with the FC or at least it’s I2C bus, given the problems I had with the compass, now with the airspeed sensor, being that they both use the same bus. FYI, only the airspeed sensor is connected to the FC for this flight/log, and the compass is not set up anymore.
When you powered on the plane did you have the pitot tube covered up? That will help it do its initial density setting before you start to fly. I’ll use a pen cap or something like that when I plug in the battery. It needs to loosely cover the end, and the static ports just in from the tip.
Yes it was covered at power up, and I let the plane sit for a few minutes getting a GPS lock and such, then commanded a “preflight calibration” again before removing the cover.
For what it’s worth, a few others looked at the log and a video of the flight, and some suggested either turbulence or dirty air from the nose of the plane affecting the pickup, or possibly a defective sensor. The easiest thing to try first was replacing the sensor, I did that and flew today with no real change or improvement. Before the next flight I’ll move the pickup or replace it and try again. I’m currently using the plastic one from Qiotek, not the traditional metal tube that extends out past the nose. Worst case I’ll swap it out for the traditional style and rule that out. I’ll follow up once I figure it out and get it fixed!
Can you show us a picture of the installation and the placement of the Pitot-tube?
This can have a huge impact un the readings seen by the Airspeed sensor.
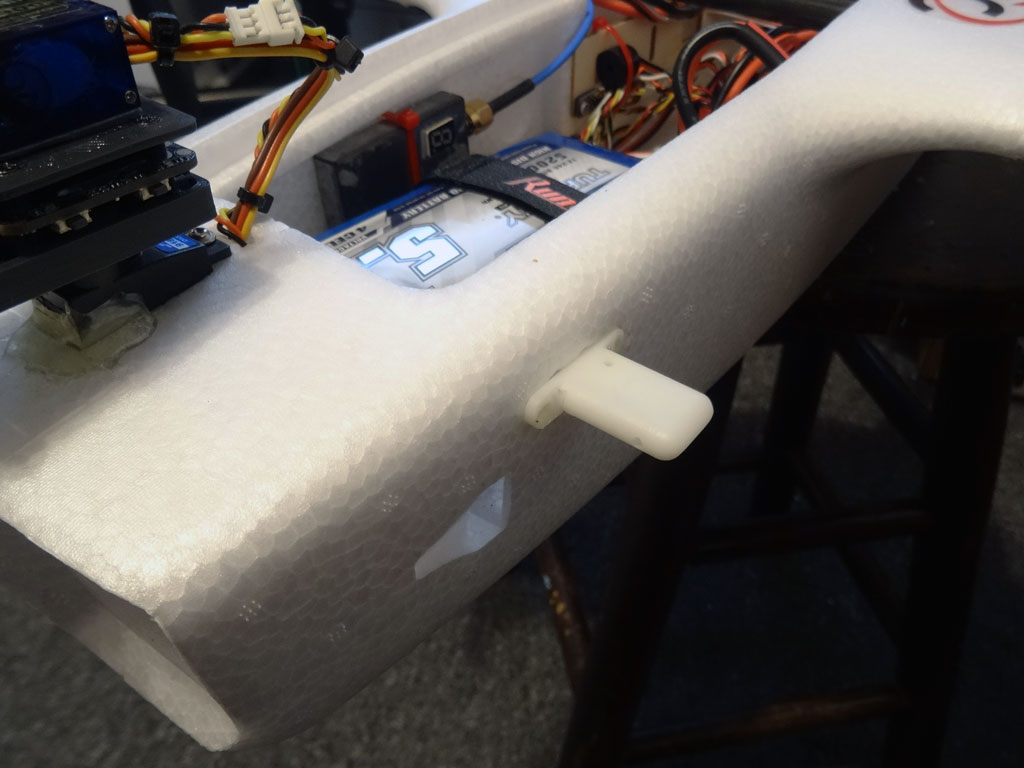
Sure! This is what I had in place, it’s the plastic Qiotek tube that was supplied with the sensor. Some were suspect of it, Henry Wurzburg uses it and says he has good results. Of course placement could be an issue in my case. Earlier today I changed it out for the traditional tube type sticking out in front of the nose, and plan to fly again with this new tube hopefully toady. If not today, soon. I think this should rule out any problems with the pitot tube, and if I still have problems I’ll looks closer at the FC. There’s still some concern there could be a problem with the I2C bus on this board, since I had problems with the compass earlier that I wasn’t able to resolve. The compass was also set up on the same bus. There is a second bus on the F765-Wing that the barometer is on, as a last resort I could try moving the compass and/or airspeed sensor onto that bus and see if they work OK there, as long as there’s no address conflicts. I’m taking it one step at a time ruling things out though. Hopefully I’ll nail it down and fix it and can report back what the issue was in the end… lol
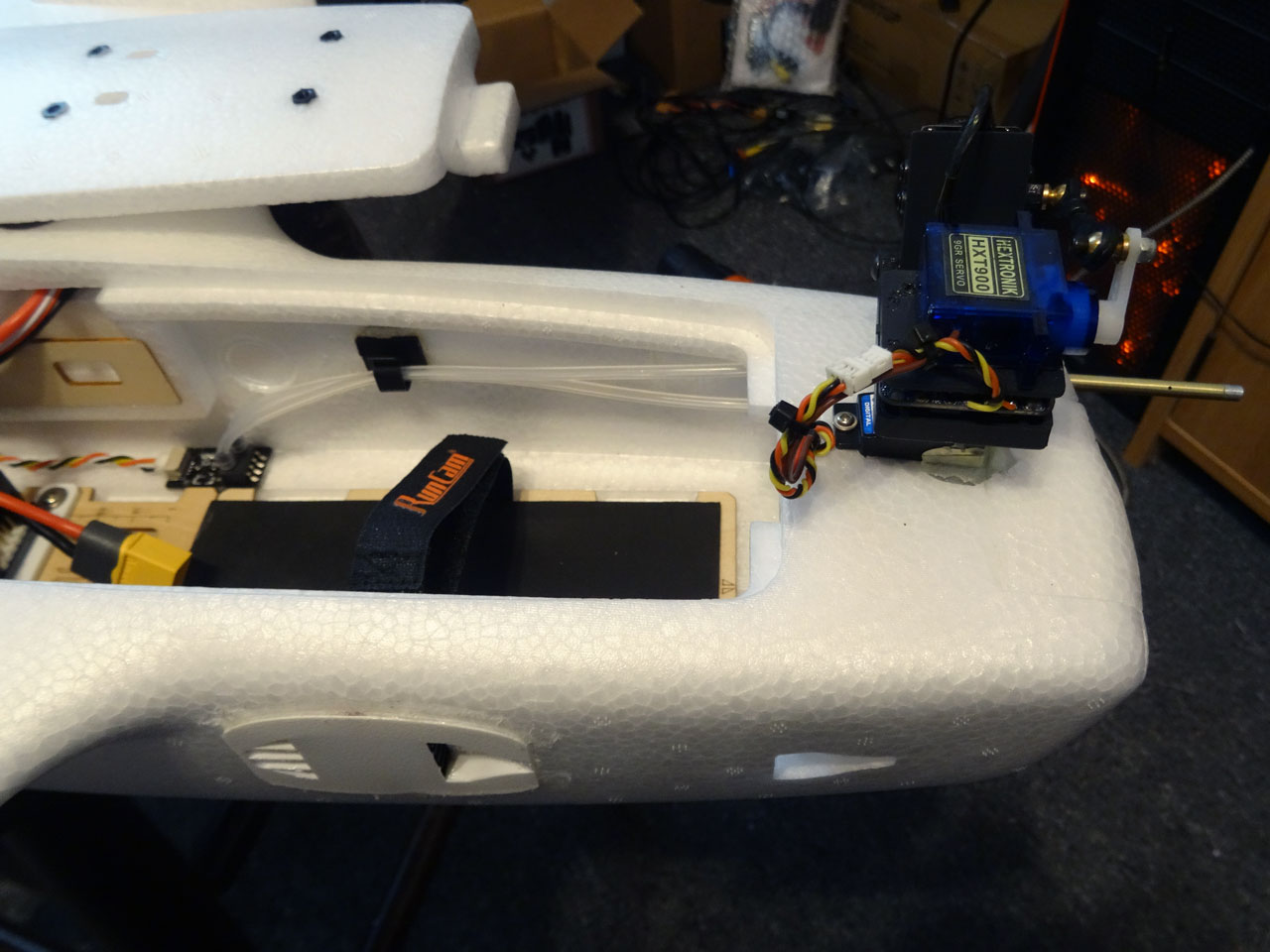
Here’s one of what’s inside. The hoses run along inside the fuse to the sensor through the little clip, they’re loose in the clip and not pinched of course. The sensor it glued down to the bottom of the fuselage to lessen any chance of it vibrating in flight. The sensor’s cable is soldered to the CL1 and DA2 pads, as well as 5V and GND pads next to the boot button.
Wiring and tubing looks good to me.
The probe in the upper picture looks suspicious. It is too close to the fuselage. The airflow will separate on the left rim of the nose. This changes with the odd yaw angles of the plane. The probe will be affected by the separated flow.
One more detail. You wrote:
Hopefully this is a typo. The sensor should be connected to CL1 and DA1. Otherwise you would mix the two i2c-ports.
As mentioned:
These probes rely on the position where they are installed.
A round nose makes a huge difference.
The new installation looks way more promising. Lets us know how it turns out.
Yes, sorry that was a typo! I’m using CL1 and DA1 for the first I2C bus.
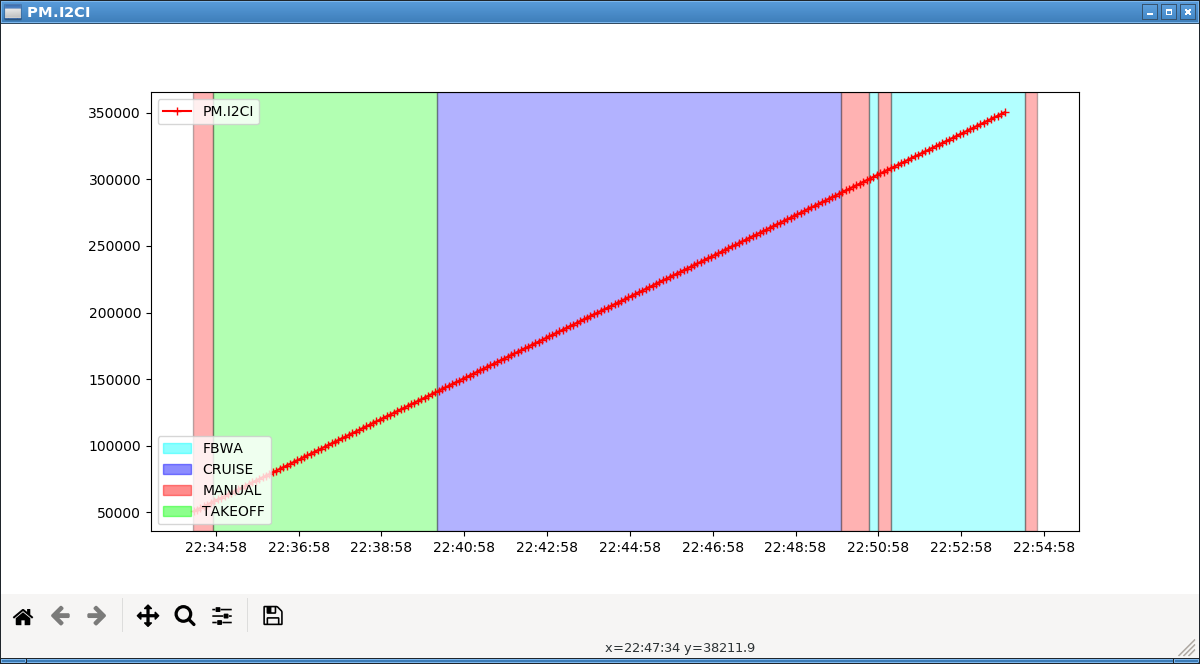
I wasn’t aware the I2C error count was logged, but yes that is very telling! It surely would explain the random compass errors and now this with the airspeed sensor. Thanks for pointing that out! It’s been in the back of my mind as I rule out everything else hoping it wasn’t an issue on the FC board since I can’t get the F765-wing anymore. lol With any luck maybe the second bus will work OK. The barometer seems to work fine on that one.
I have everything ready to go, I may do one more quick flight this evening just to confirm the issue is still there with the new pitot tube, then move it over to CL2 and DA2.
Either way I’ll report back what I find! Thanks again!
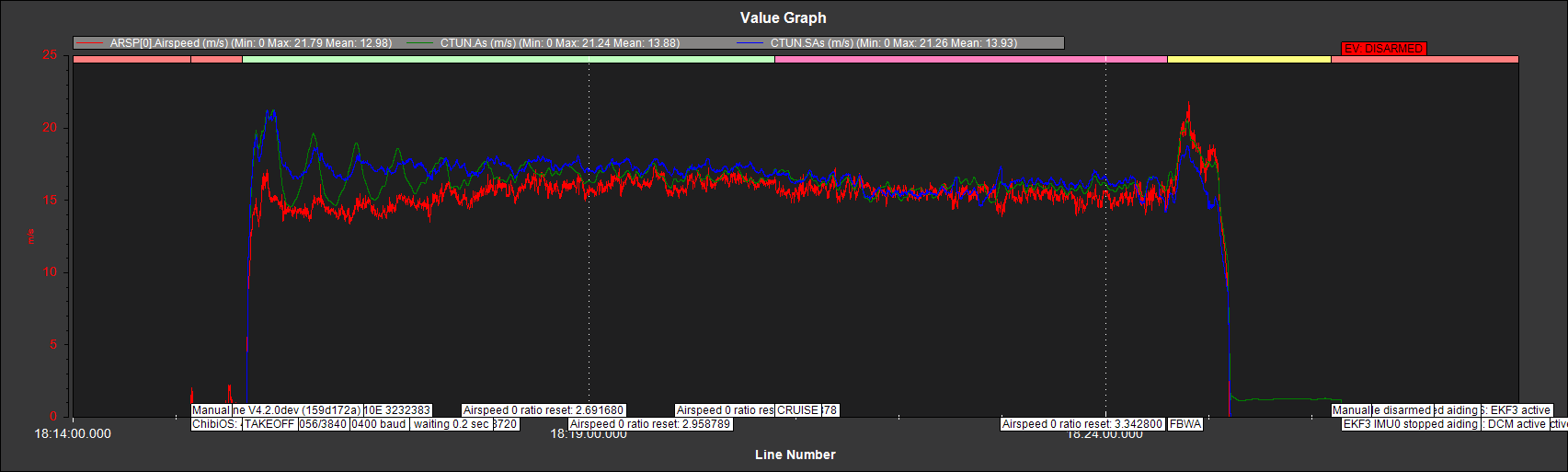
This is what the airspeed looks like along side CTUN airspeeds now, far better than previously. The reading on the OSD is also very stable and not bouncing around now, and after giving it some time to calibrate it lined up with what the synthetic airspeed was showing, within a couple mph all the time. I guess it was just dirty air hitting the plastic pickup and the new tube solved that. Sadly it doesn’t explain the problems I had with the compass, but I’ll revisit that another day…