After successful navigation through the setup procedure for the TX, servos and swashplate and setting “0” pitch at mid collective stick on the blades then moving on to setting MAX blade angle to +11 degrees and MIN blade angle to -2 degrees on my UAV, when moving the collective stick back to center puts the blades at positive 4.5 degrees, not “0” degrees where I started.
What am I missing? I know I am one mouse click away from fixing this issue but I can’t put my finger on it.
To add: Mid-stick PWM adjustments do not move the swashplate position.
Thanks for the assistance with my understanding.
H_COL_MID does not determine the mid position for the collective stick. It is only used for the collective to yaw feedforward where it sets the zero thrust collective position as the zero mixing point for the collective to yaw feedforward. The other feature it is used for is the minimum collective for non manual throttle modes. It prevents the autopilot from setting the collective any lower than the H_COL_MID position. So it is VERY important that this is set to the collective position that corresponds to zero thrust. For symmetric airfoil blades that is 0 deg collective pitch.
Hope this makes sense. Let me know if you have any other questions. Also how was the wiki in helping you with the setup. Any input on how we can make it better?
Regards,
Bill
Tradheli Maintainer
Bill, thanks for the quick reply.
This is my first setup with the CubePilot and Ardupilot. The process using the instruction has gone very good up to this point. Just confused with going into Heli Setup, Swashplate Setup, then setting blade angles with the Maximum Pitch PWM adjustment, the Zero-Thrust Collective Pitch PWM adjustment and the Minimum Collective Pitch PWM adjustment. Setting the adjustment for MIN and MAX Collective PWM works perfectly for me but in doing so the zero blade angle drifts from zero to a positive blade angle and making an adjustment on the Zero-Thrust Collective Pitch PWM does not move the collective position at all to bring it back to zero blade angel.
To bring the blade angle back to zero-thrust I have to tweak the maximum and minimum collective pitch PWM adjustments but now my intended max and min blade angles are off.
Moving from years with Skookum I need to understand Ardupilot like the back of my hand and I will get there, its a wonderful system.
So you are saying that when you use the H_SV_MAN parameter to set the swashplate to mid position, it drifts on you?
That’s probably my issue. I am not seeing H_SV_MAN in the Full Parameter List in my Ardupilot.
I see it referenced in the instruction.
All I see are the MAX, MID and MIN Collective.
To give you background this is a 4 servo Velos UAV and I am in Linearize servo mode.
I have looked through the Full Parameter List and used the search feature but H_SV_MAN doesn’t show.
Where do I find it?
Look at the middle of the screen. I’m in the full parameter list
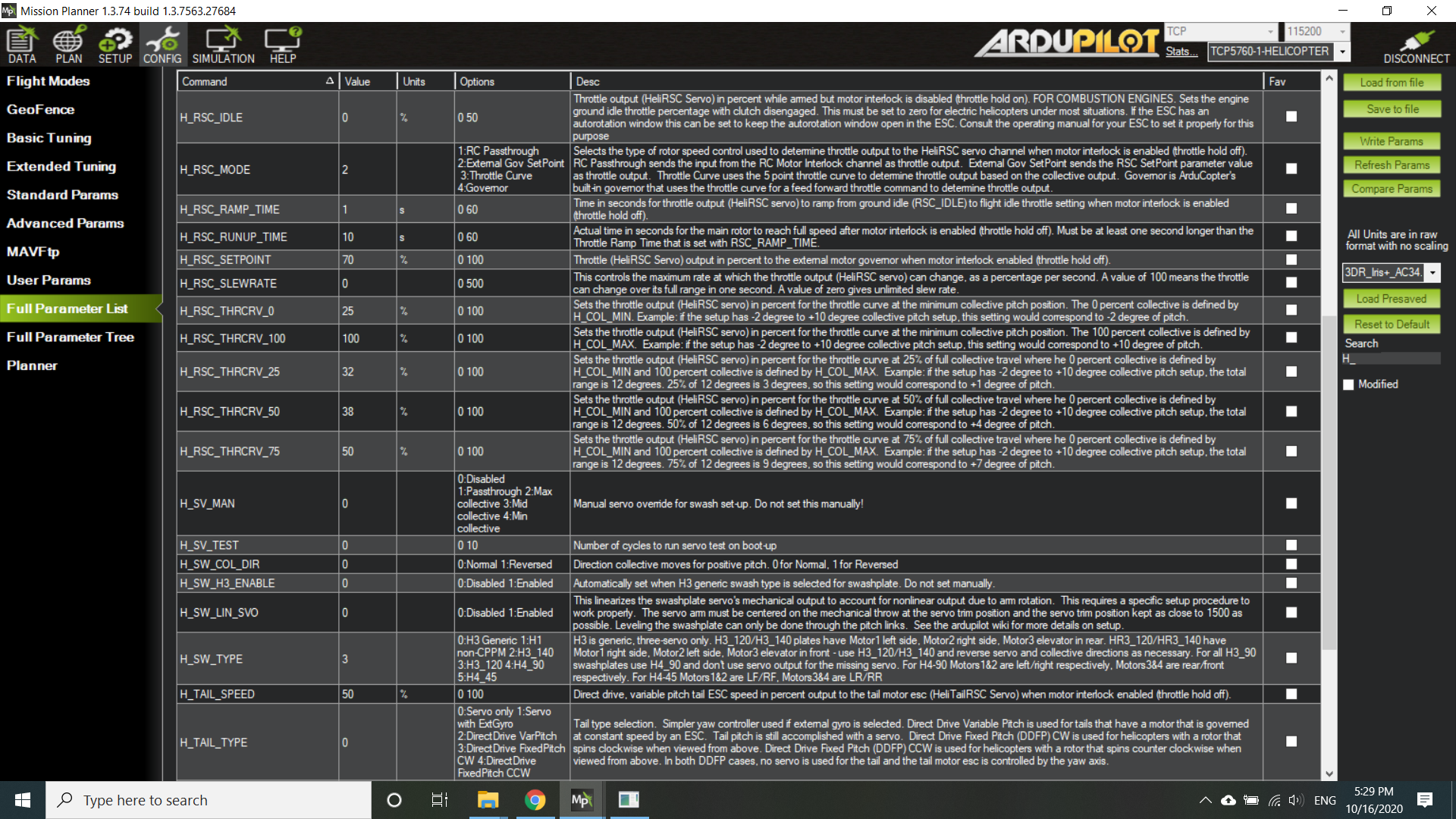
use the search feature on the right
Yes I see it on your list but I don’t have any of the H_RSC_ or the elusive H_SV_MAN setting on my screen. Basically I don’t have any of the parameter list you show.
Must be getting close to solving this.
Bill,
Thank you so much for the screen shot of the correct parameters. I reloaded the firmware and now have everything including the missing H_SV_MAN.
Thanks again, I owe you lunch.
Allan
Allan,
No problem. I’m glad you were able to resolve the issue. Let me know if you have any other questions.