Today I’ve tried to fly my quad-copter loaded with AC3.2.1 code by arduino.
Situation here was:
Armed the motor in stablize mode
Increase throttle to take off and hover around 1meter above ground
Changed to Alt_Hold to test the throttle reaction, “It is increasing height even though my stick is at 50%”
Changed to Land Mode with Land Speed set at 35cm/s
While the quad-copter was slowing down and decending to ground, i moved my yaw stick left and right and then suddenly the motor increase its speed as it max throttle was there. "This was during Land mode, which Throttle stick should not affect the motor.
I took of the props and re-tested my situation, but this time round the motor did not increase speed while in landing mode. So I could not find out whats the issue I’m facing
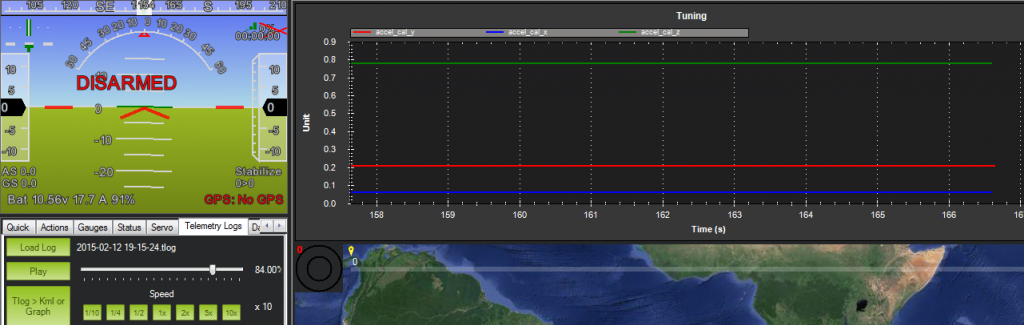
I’m not able to view the ACC_Z (Acc_Cal_z) plot accurately from telemetry logs. I don’t know why, The graph i got was just a pure straight line which is without any vibration and it seems pretty impossible to me…
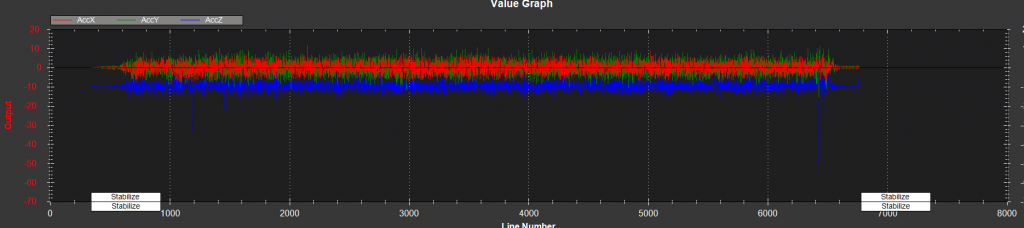
as observed all my accelerometers measurement of vibration is totally unacceptable. Therefore i guess I have to work on my vibration damping.
However my ACC_Z values have a sharp spike of almost -60, what are the reasons that might cause this sharp spike?
{kind=link}
{kind=link}
{kind=link}