Hi,
We can use this function to get desired vel, accel and angle. I got figures of these variants, but I found that NTUN.DAccX is a little bigger than the derivative of NTUN.VelX, just as follow:
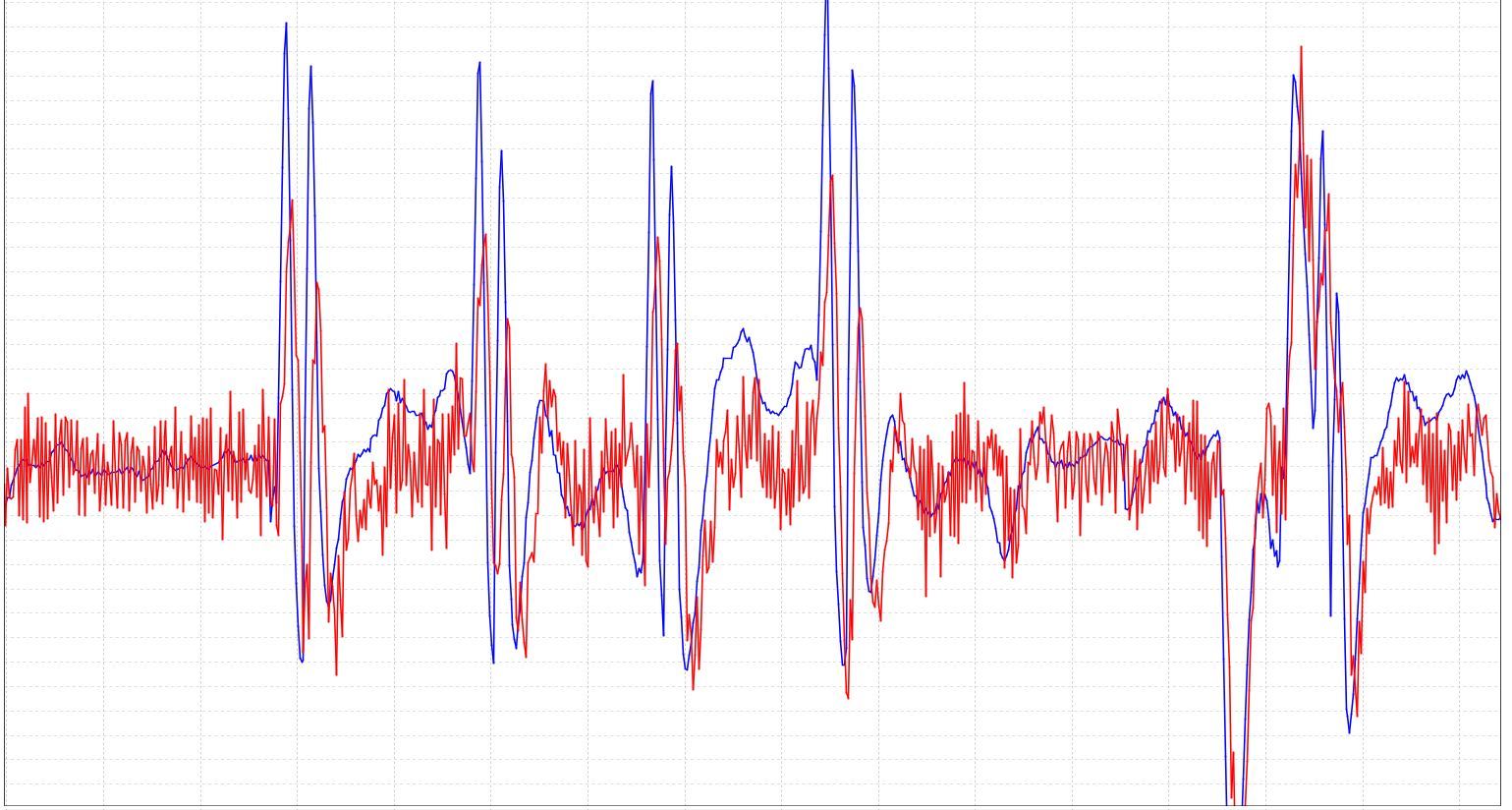
the blue line is accx and the red line is the derivative of velx
But the derivative of position is close to vel, just as follow:
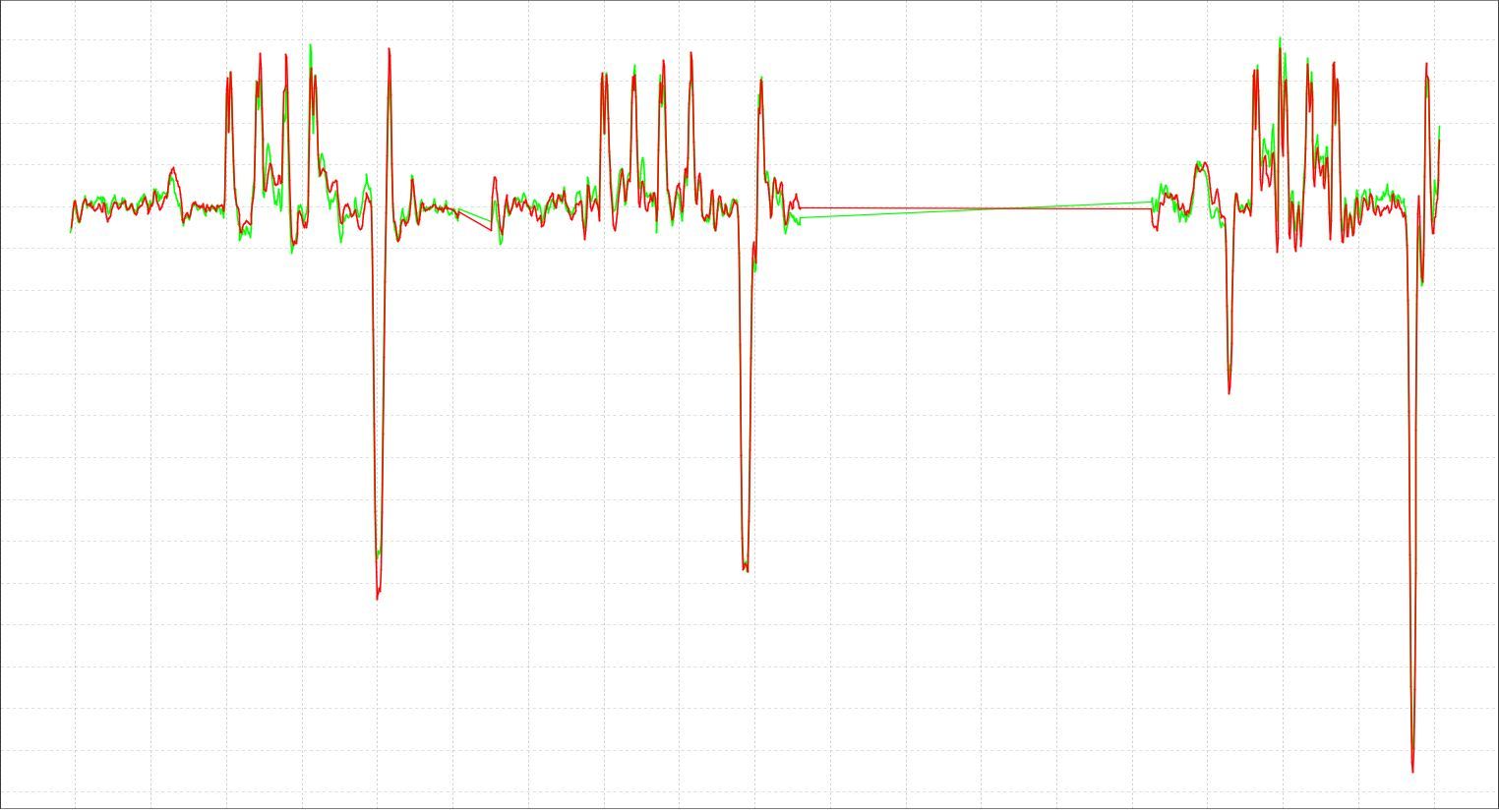
the red line is derivative of pos and the green line is vel
What could cause this phenomenon?
Thanks