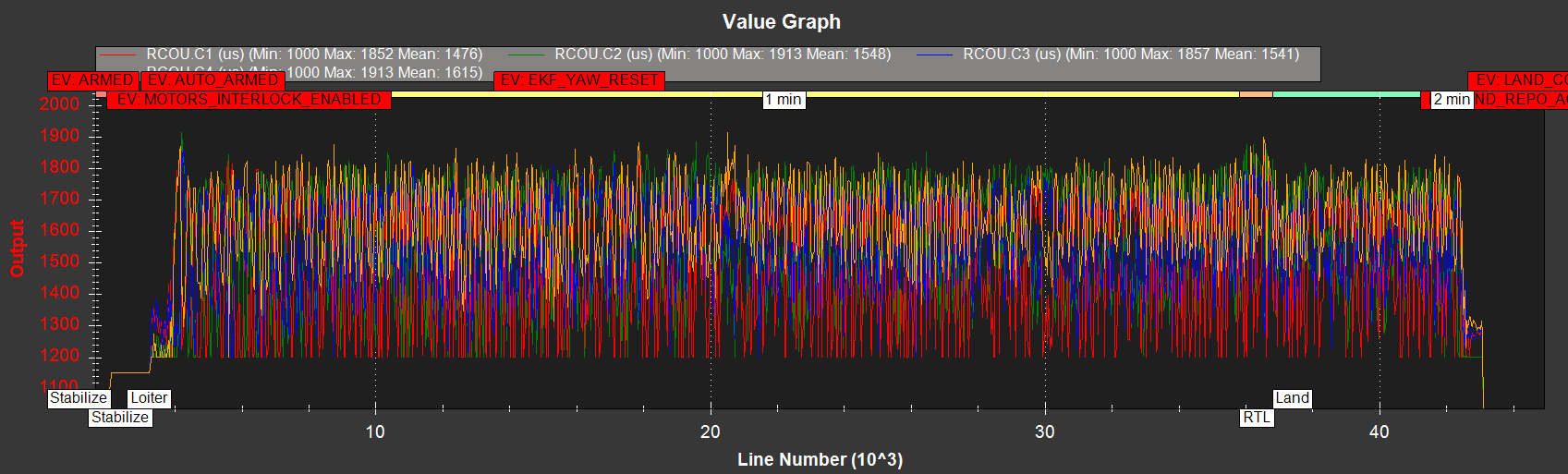
any idea about this RCOUT ?
log file
What ESC’s are you using?
Have you done the ESC calibration?
I have seen this with BL-Heli and Shot ESC’s when used from PWM outputs.
I’m using Air Gear 450 set (Air 20A)
Yes i did
I cant see anything amiss in the obvious places.
You have your ATC_THR_MIX_MAN set to 0.1 and I believe the default is 0.5, any reason for this?
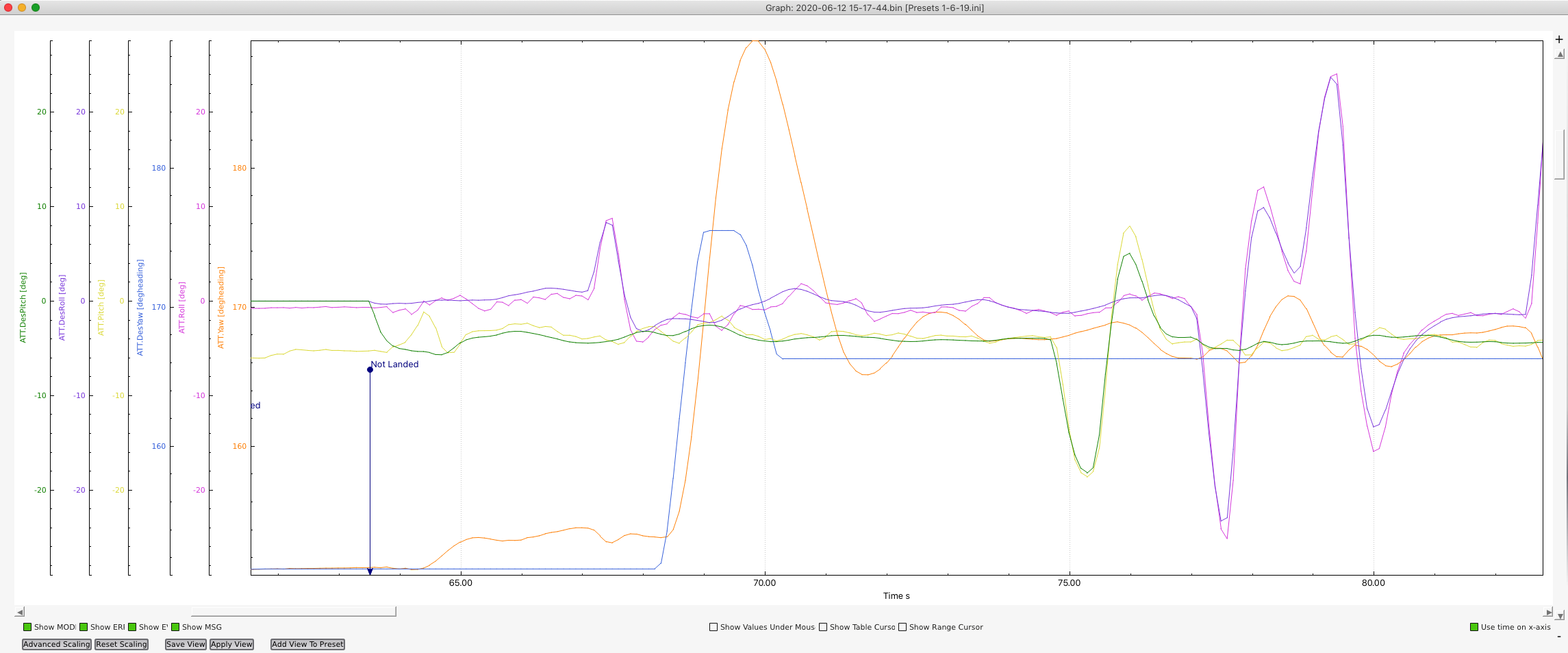
Looking at the outputs the copter seems unbalanced in the roll, but looking at the act/des I see the roll and pitch hanging on quite well but the yaw is swinging wildly.
i was set this from tuning process instruction
its because of yaw still not tuned
i checked arms and props level they are ok
Pixhawk 2.4.6
Daya 550 Frame
2216 880KV motors
Air 20A ESCs
T1045 Propellers
4s 5500mah battery
copter weight is 1960g
@mboland this problem happened after mounting gimbal , copter wight was 1600g without gimbal
in flight everything was good but in the log RCOUT values are not normal
Have you tried a test flight with the gimbal removed?
Is the gimbal on a suspension of some sort?
Are you saying the abnormal RCout was not there before the gimbal?
yes and RCout values was normal , ~1560
yes
yes before mounting gimbal everything was normal
There is your answer then.
There is obviously something wrong with the way the gimbal is mounted
Check the gimbal mount for rotational instability, and the gimbal itself of course.