In the automatic task, there is no yaw change command and manual control, but the Copter changed the yaw itself.
Log file address:https://drive.google.com/file/d/1sovPNSHDuaAKimXzngOehNbSzQiVY2l3/view?usp=sharing
In the automatic task, there is no yaw change command and manual control, but the Copter changed the yaw itself.
Log file address:https://drive.google.com/file/d/1sovPNSHDuaAKimXzngOehNbSzQiVY2l3/view?usp=sharing
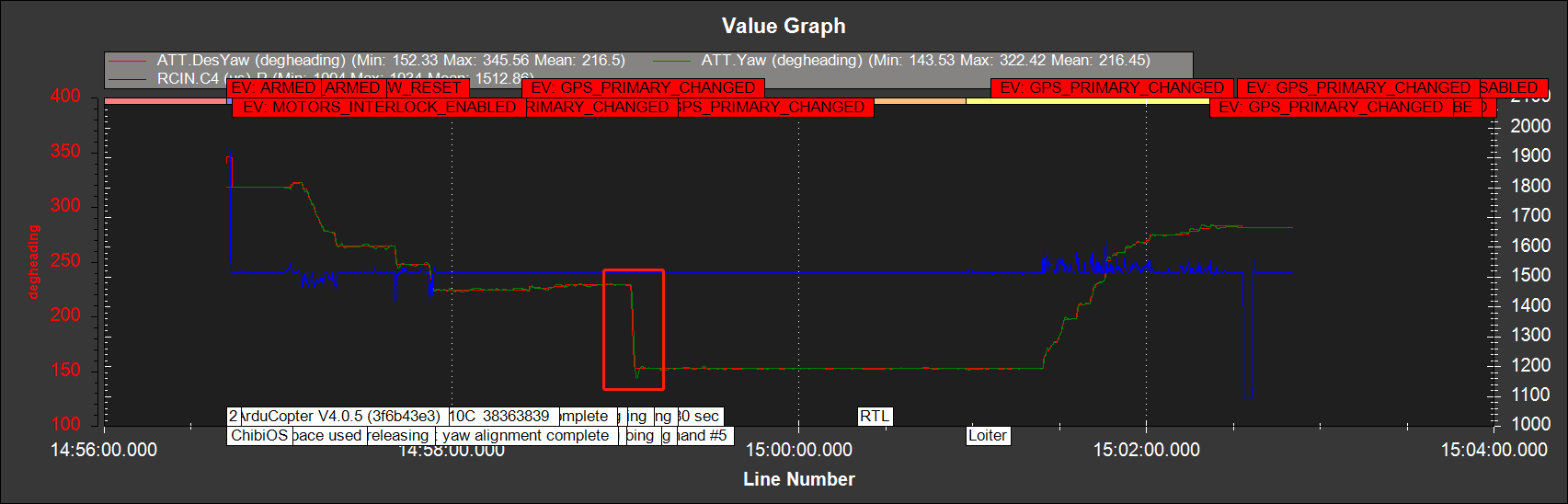
did you touch the yaw stick on the RC transmitter?
You can see on the screenshot that the blue line, RCIN4 is untouched, thats yaw.
Please check WP_YAW_BEHAVIOR parameter in here and set it accordingly. Make sure there is no Poi or Roi in your mission
Can you also share the mission file? I will check it out later when I have time