Hey guys, I REALLLLY want to get this drone flying today.
I have a 3DR Iris+ with a pixhawk board running ardupilot on chiBIOS.
The radio has rechargable batteries until I switch that to LiPo soon.
I set my PC up to be the command center.
Last night the drone was flashing a yellow light,which means a lot of things.
I am balance charging my LiPo 5100 mAH 11.1v battery right now to see if that fixes it.
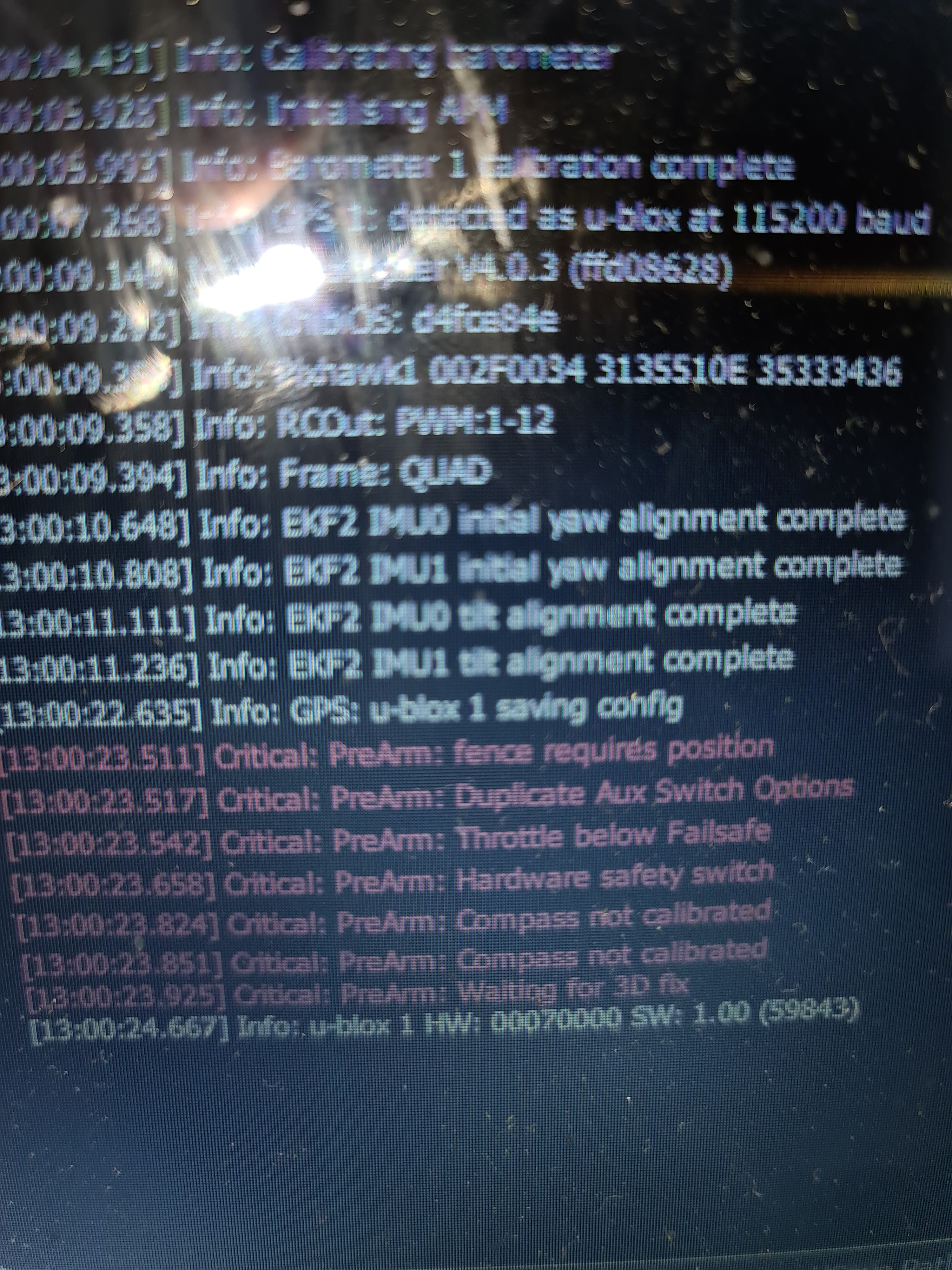
I have all the error logs from “QGroundControl” from when I plugged it in via USB.
I have already taken the screws out and plugged directly into the pixhawk board via USB as well when doing the firmware update.
If you can help me with this if it doesn’t work after I get this battery charged DM me and if you help me get it going right. I will pay.
Thank you
[7:30 AM]
and I am a real person… Just need to get this done because I have a photography business I am launching and have been advertising these drone shots
The old adage, “Cart before the horse” seems about right here. Most of us have YEARS of build, and flight practice before we advertise… are you part 107 licensed?
It could be as simple as the GPS doesnt have a 3D fix if you’re inside. Connecting a ground station and looking at the messages will definitely help you.
You’ll need to describe in more detail if it wont arm and fly - if it does fly but is not right then we’ll need a .bin log file.
QGroundControl should be able to update the firmware and interact with the flight controller just fine if it can already tell you are using “Ardupilot ChiBios”. Even the correct flight controller should be detected if you try to do another firmware update via USB. Basically it’s already in a workable state.
If you want to be sure of the firmware version (FMUv2, FMUv3 etc) then send a photo of the flight controller. Does it look like this? (without the blue lines)
It has a sd card slot, an USB port, and a removable SD card in it.
The only errors QGroundControl says is all pre flight errors and GPS error.
The pixhawk flight controller and the drone LED both double flash yellow which could be a battery error.
When I balance charge the battery the balance charge times out.
I keep running 2 hr balance charges on this 5100 mAh 11.1v lipo battery and the numbers next to the timer keep getting lower and lowe with each charge.
I don’t really know what this is doing but I know I should be able to put a balance charge on this 5100 mAh lipo battery in about 40 minutes with this 50 watt charger.
I am pretty sure this battery is messed up, any thoughts on the battery based on what I was able to convey with my limited knowledge?
Hey man thank you again for your time and empathy, I am sure you were at were I am at right now in the drone industry/hobby.
You can set the LOG_DISARMED parameter and reboot, wait a while, then upload the.bin log file somewhere (dropbox or similar) and post a link to it. Get used to this method of providing logs since its most useful and screenshots often have limited value.
Also go through the documentation, it’s laid out in the order you need to use it.
Any errors or issues and you can easily search the doco or this forum.
Something to work on tomorrow. I just ordered 2 other drones that will be plug and play but I want this one running… I have the gomblr setup on the way.
It is a V body, it says so on the expert manual