yesterday ,i have got a boat ,and a PIXHACK v3 flashed it to rover4.3.2beat6,with 2cell 18650 battery votege to 7.4-8.4V,and two ESC i don’t know what type , and i train this boat today …
first , i found ,the GPS singel can 3DFIX,but ,it’s Survey Precision can’t belived…
so ,i acording to the document of Index of /rover/docs but ,the speed i think is not correct , so the cilibret of cruise i think is wrong ,and …througt to speed i can’t train it at all …
maybe the speed need rase to 3m/S then the GPS can work good ?
here is my param and my T-LOG… is someone kindly can help me ? 20221223.param (15.4 KB)
I suspect the problem is speed tuning and turn rate tuning so if you haven’t done either of these yet I strongly recommend you give it a try. Beyond that, is there any chance you could provide an onboard log?
Tlogs and parameters are really not enough I’m afraid to understand the issue.
thank you @rmackay9 ,link:百度网盘 请输入提取码
pwd:2jyh
–来自百度网盘超级会员V6的分享here is my BIN file and my param file ,i have fix a gps mistake ,and the boat looks good but it displacement the way for a constant distance 。
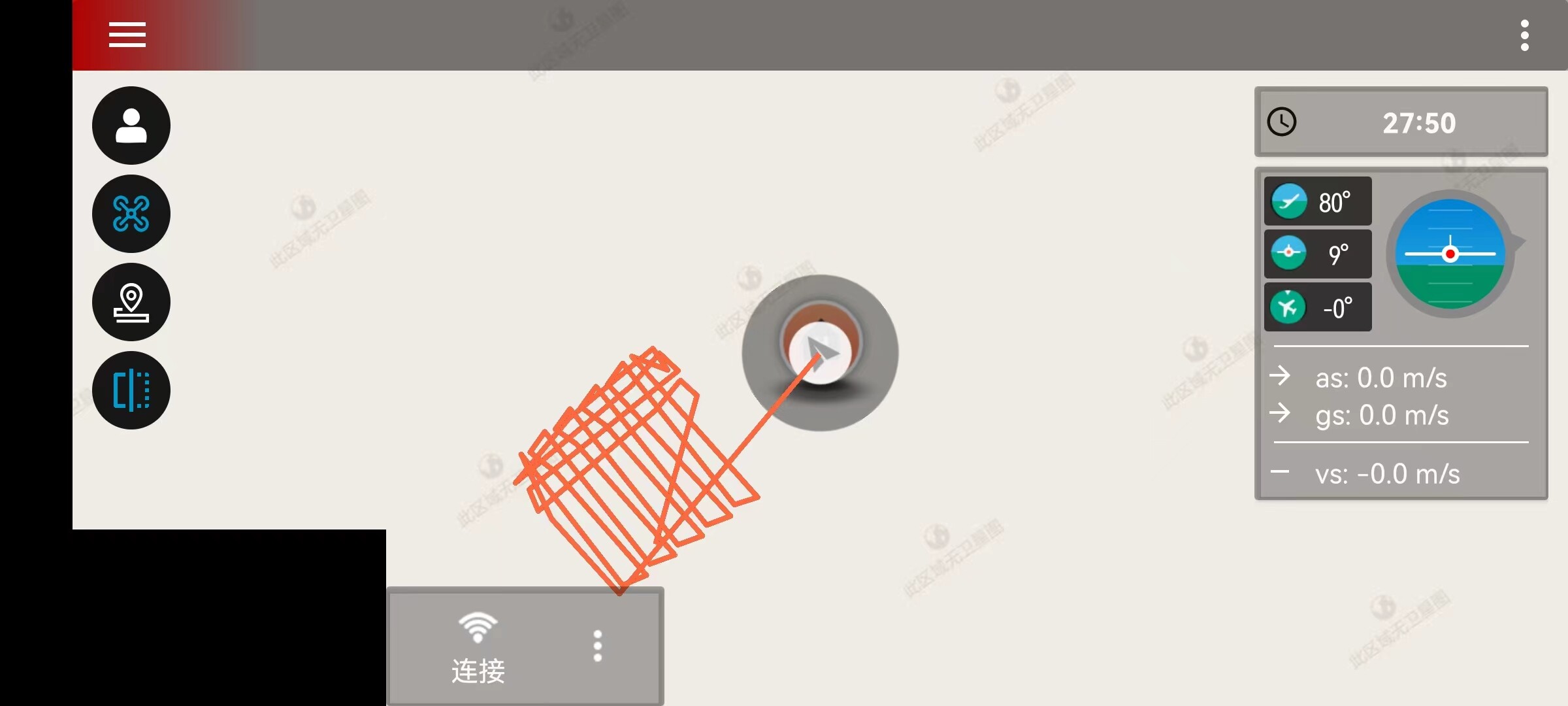
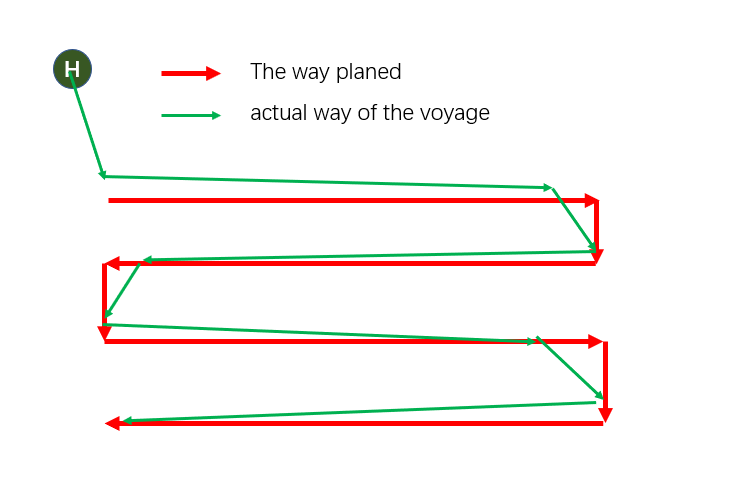
but there is a proublem: the line i set is parallel to the next line ,but when the boat reach the way point ,it straightly go to the next waypint ,without return back to the right line i want .whitch param i should to turn ? thank you! …this is the picture:
I understand the problem you’re having. The picture shows the issue. What I can’t determine is the cause. Need a .bin log for that, and I won’t be able to look at it until next week. Others may be able to help in the meantime if you can provide the log.
I see that above you posted a .bin log on Baidu but I was unable to download it despite using Google Lens to translate. It said, “install latest network driver” which I’m not willing to do.
Thanks for the log. I haven’t reviewed it completely 'cuz it’s getting late here but here are some comments.
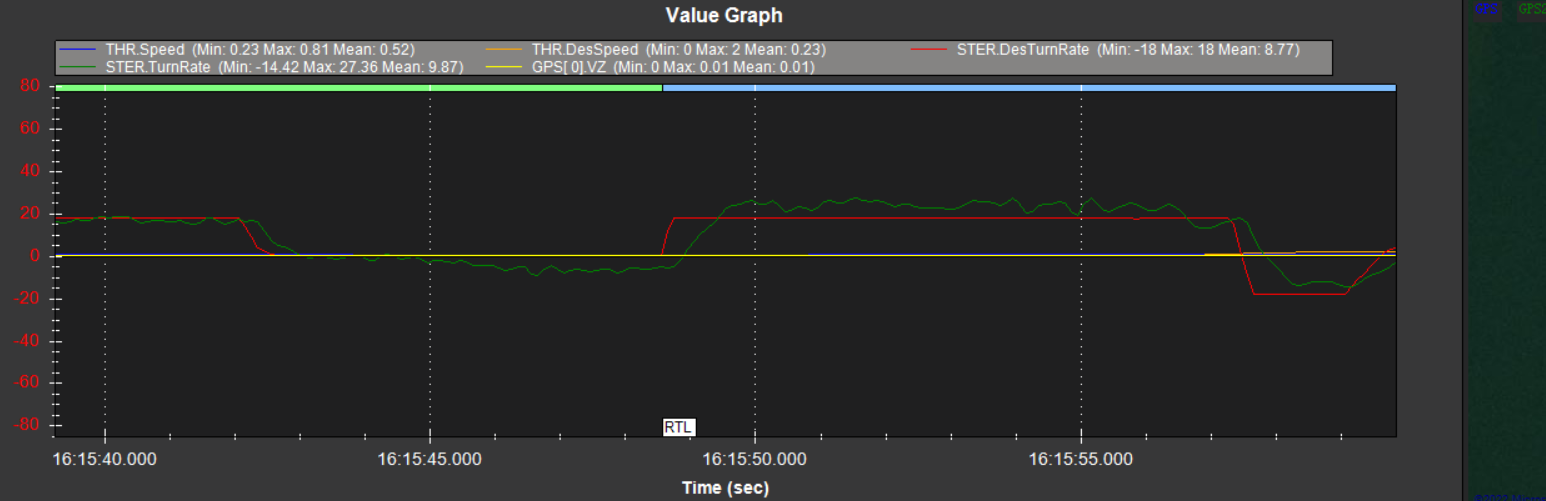
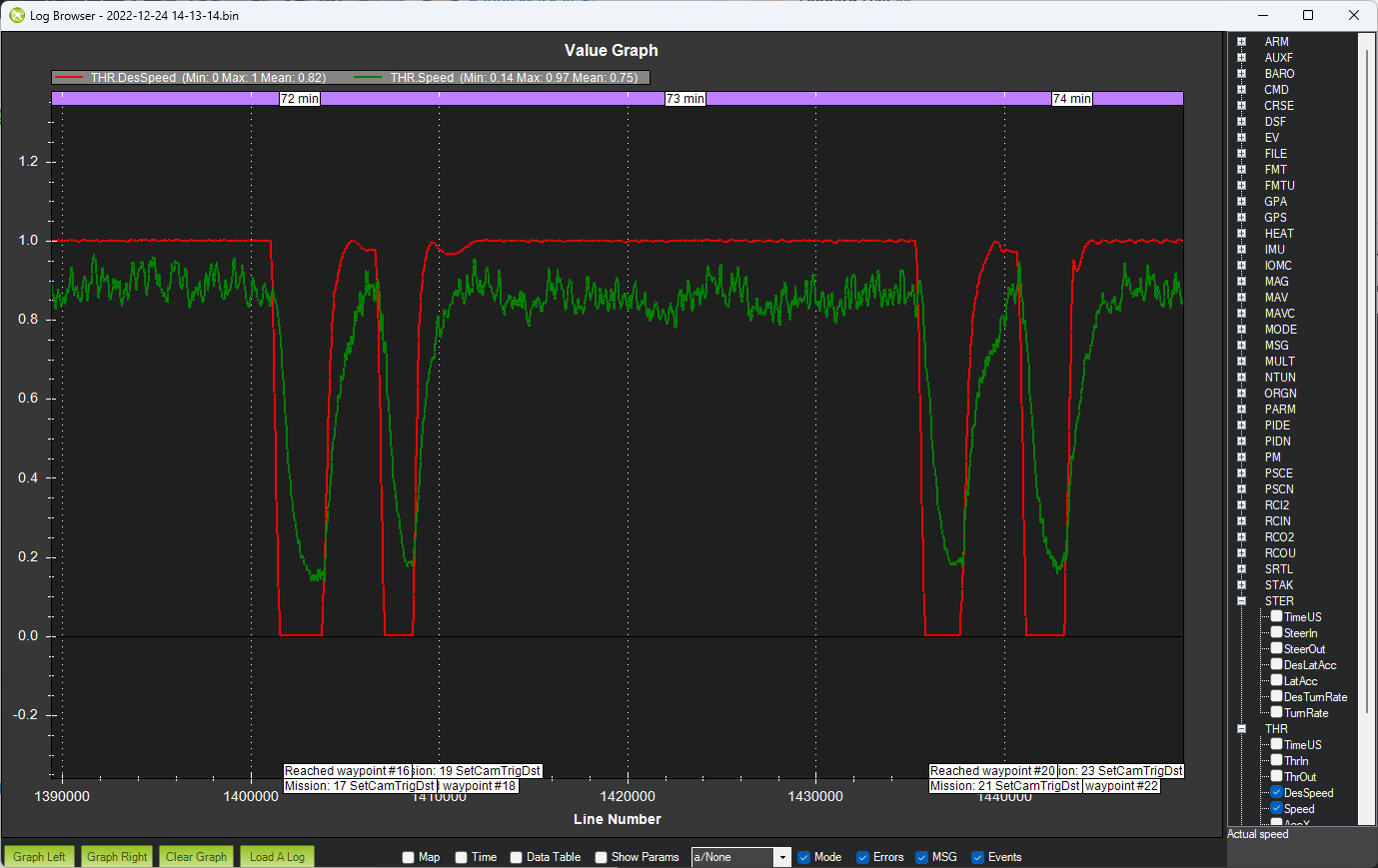
The speed tuning looks pretty OK. Below is a graph of the desired and actual speeds. The only slight improvement might be to reduce the ATC_ACCEL_MAX a bit from 1.5 to perhaps 1 so the vehicle slows down a bit more before reaching the next waypoint.
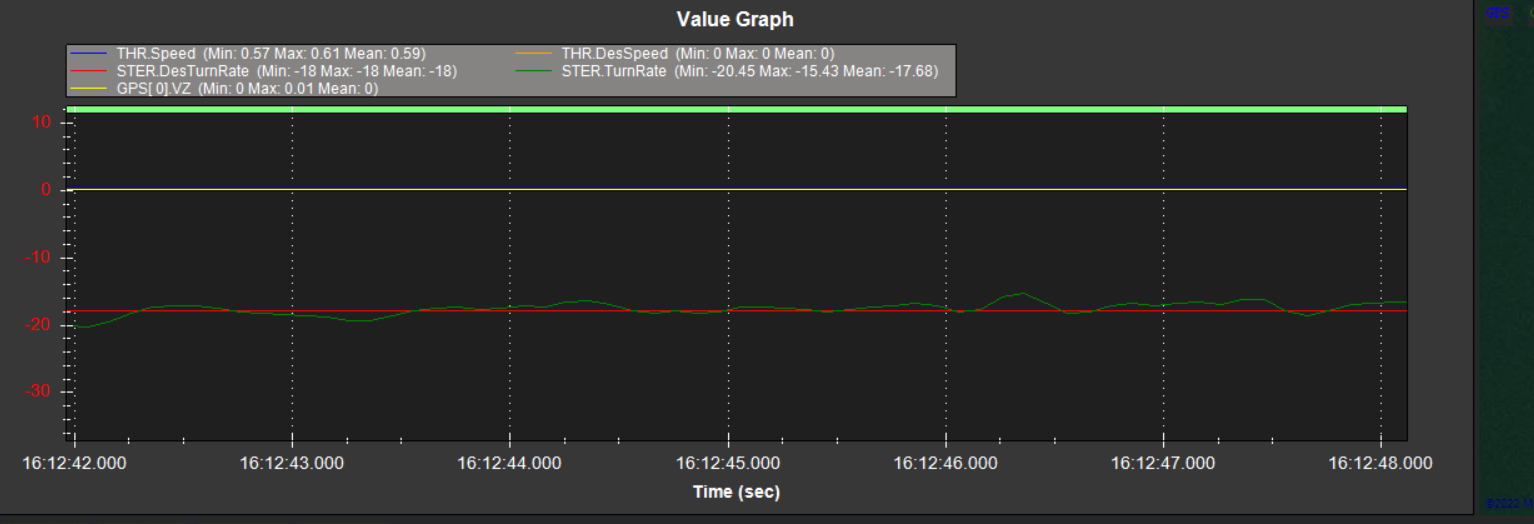
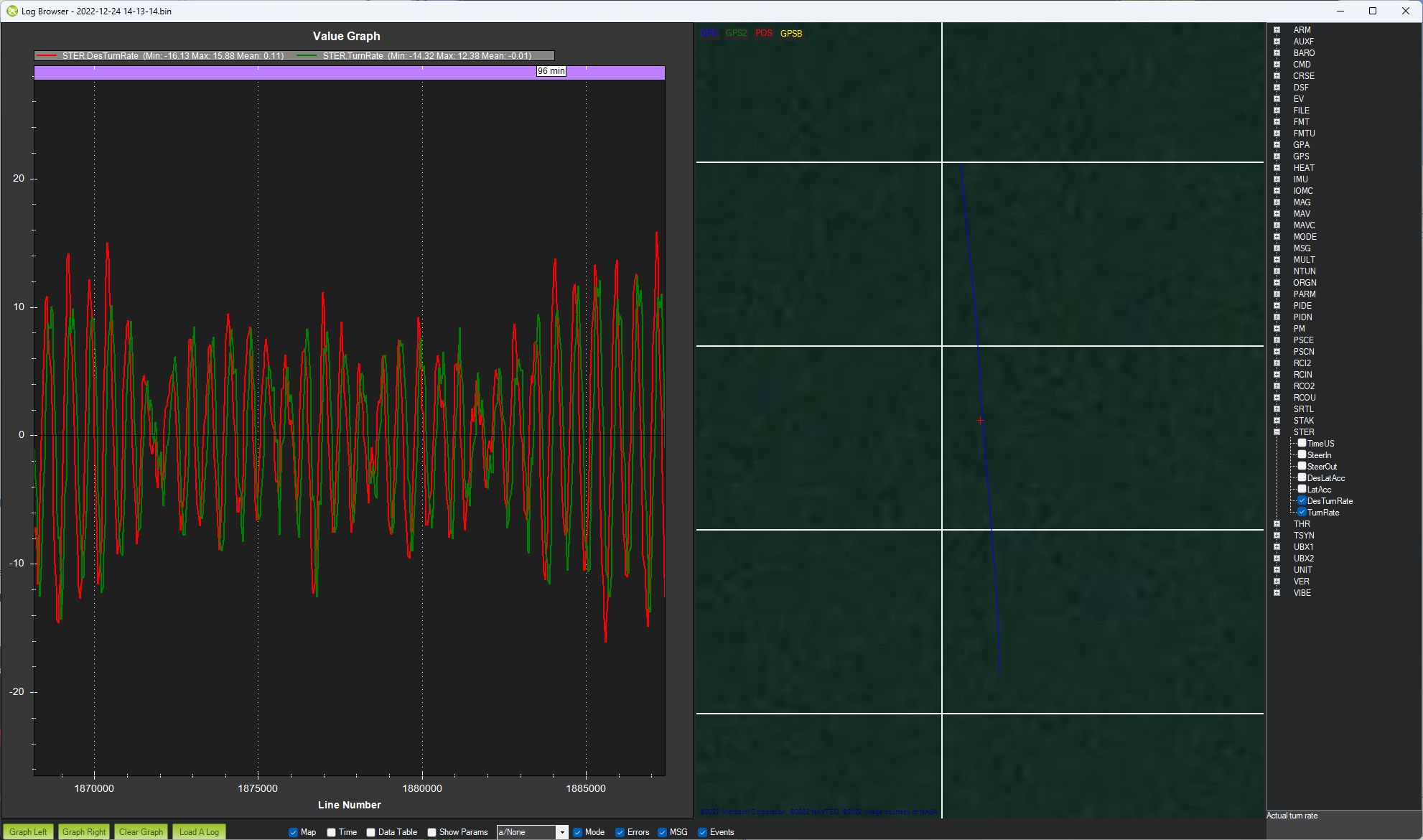
From the image above though we can see that the desired turn rate is oscillating a lot. Because it’s the desired (and not the actual) that is oscillating, this means the upper level navigation controller is the source of the oscillation. For reference the navigation tuning guide for 4.3 is here.
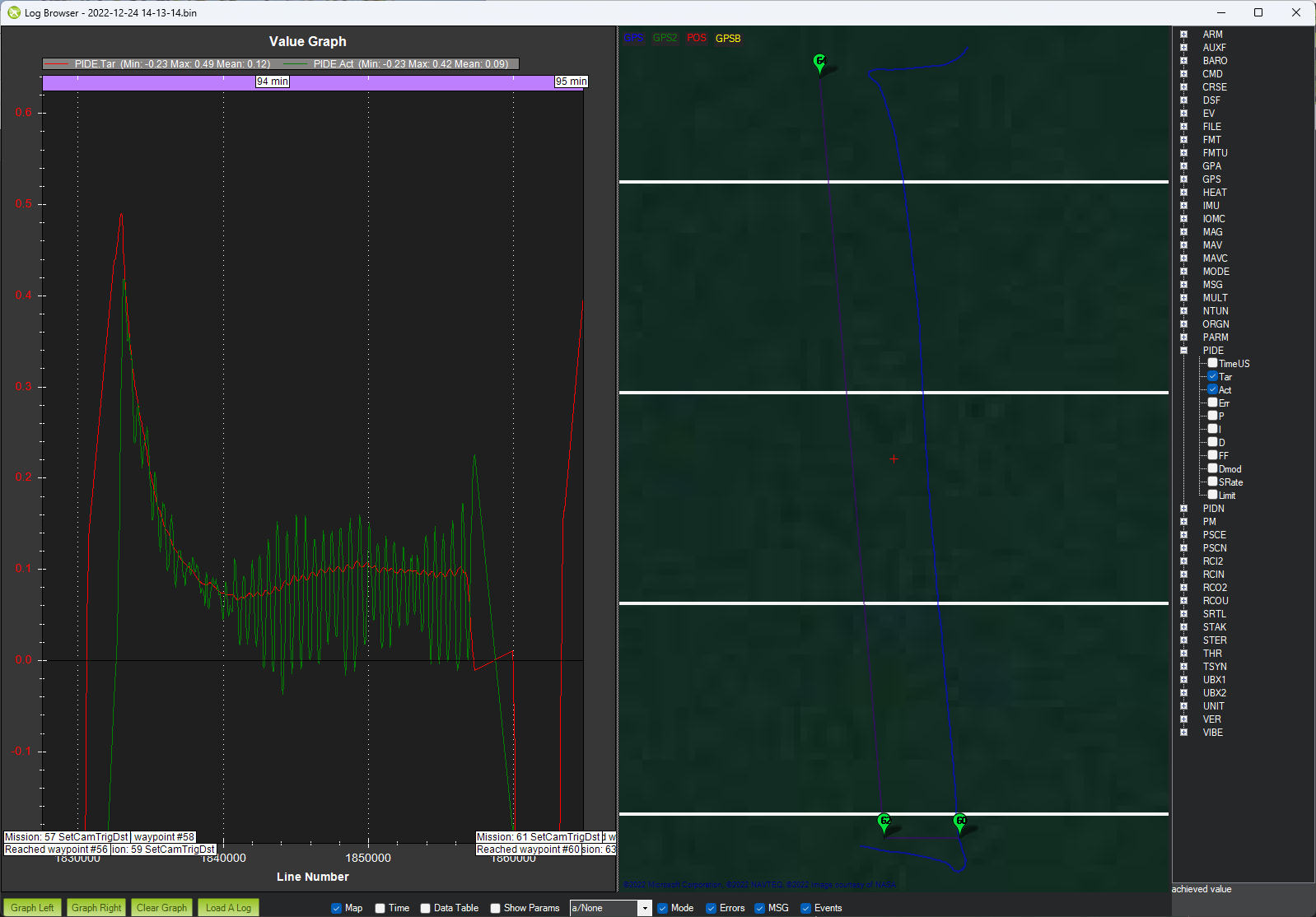
If we zoom in on the PIDE (PID controller for East-West velocity control) we can see the desired velocity (in red) looks OK but the actual velocity (in green) is massively overshooting.