I would like to ask for help on tuning my first Arduplane build, an 1.60m wingspan sea plane, running AP 4.1.0 beta4.
CG and control surface throw is within the vendor spec and it is flying good and stable in manual and acro.
In FBWA and cruise however, it oscillates on pitch and I could get rid of it.
Althogh the plane is about 2kg AUW and cant do a full loop, its quite sensitive on pitch axis.
I completed about 20 flights for tuning, changing CG, running autotune in different weather conditions or after lowering pitch P-Term manually but it never flew smoothly.
TECS have been tuned after the first successful flights and autotune.
Autotune was done per axis until the message “* completed” popped up + an extra grace time after without stick input.
With higher P, there was less visual oszillation but a lot more servo oscillations or even active Dmod, as stated by the logs.
Comparing PIDFFs between the autotune results showed, that roll PIDFF values came out quite similiar but PTCH_RATE_P ended up between 0.05 and 0.95 across all attempts.
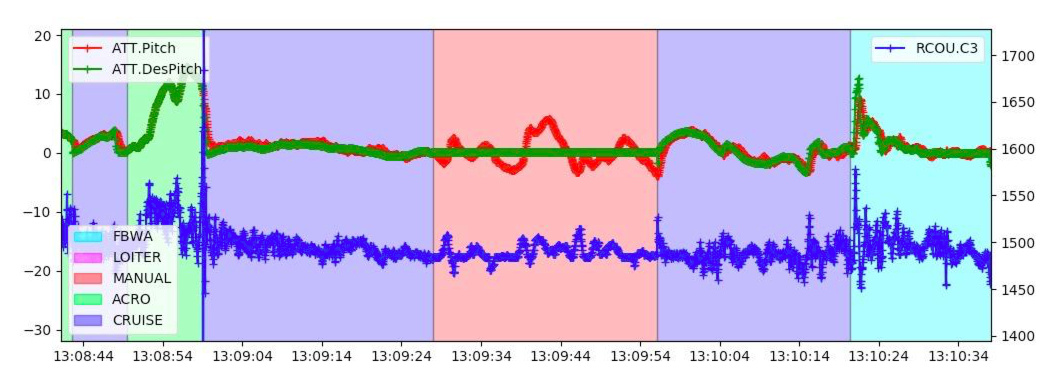
Here is the logfile of my last flight which shows:
acro handsfree
manual handsfree
FWBA
cruise
some full-stick manual (I wanted observe the rates)
The concerning part is between 3m27s and 4m23s using the following PIDFF:
PTCH_RATE_D 0.002
PTCH_RATE_FF 0.158
PTCH_RATE_I 0.199
PTCH_RATE_IMAX 0.666
PTCH_RATE_P 0.06 (after cutting it down by half twice & testing)
I think it would be worth turning up the AUTOTUNE_LEVEL. I agree that the plane looks very pitch sensitive (I didn’t look at roll), so the controller may benefit from the faster autotune levels. Especially if you’re 100% that the C of G is correct.
Hi, I read that you tuned the TECS algorithm successfully. Would you be so kind to post some flight logs in auto mode where the plane holds both altitude and speed? I’m writing an essay on how TECS works and I wanted to make some comparisons between flights pre and post tuning. Thanks in advance!
I fear, I dont have pre and post logs of that and I honestly dont know if my TECS tune was a real success. I meant, I tuned TECS after a successful maiden but I just started with Ardu and would call myself a novice.
Regarding the issue itself, I did a couple more flights and used AUTOTUNE_LEVEL 7 as discussed. While the numbers where almost identical on roll, I got much higher P on pitch.
I also tried to dial in the AHRS_TRIM_Y more but cant get closer to a fluctuating value of -1deg to +1deg while crusing. Any minor change will move that “bandwith” to 0-2deg for example, so I guess the current TRIM is okay.
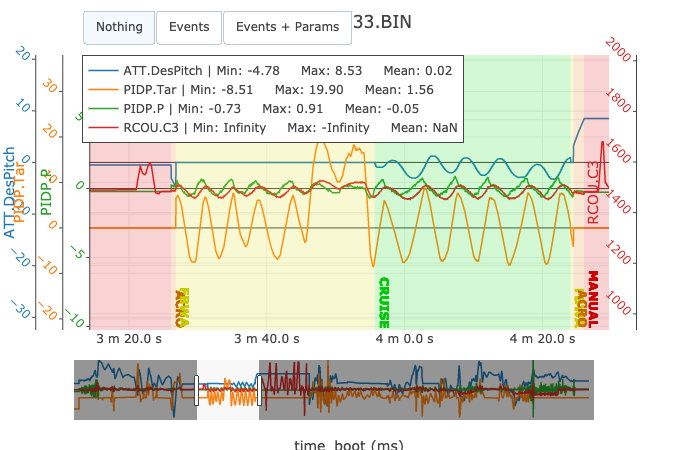
I still see the elevator servo doing its thing in cruise but the visible oscillations disappeared:
 but I just started with Ardu and would call myself a novice.
but I just started with Ardu and would call myself a novice.