Maybe someone out there might have the same problem as mine. The ESC’s continuous to beep indicating an invalid signal according to DJI’s docs. Beeping is the same if Pixhawk wasn’t connected and even when the safety switch was engaged.
My setup.
DJI F450 ARF with 30A OPTO ESC
3dr Pixhawk with Power Module
3dr GPS
Castle 5V 10A BEC - connected to servo rail on FC.
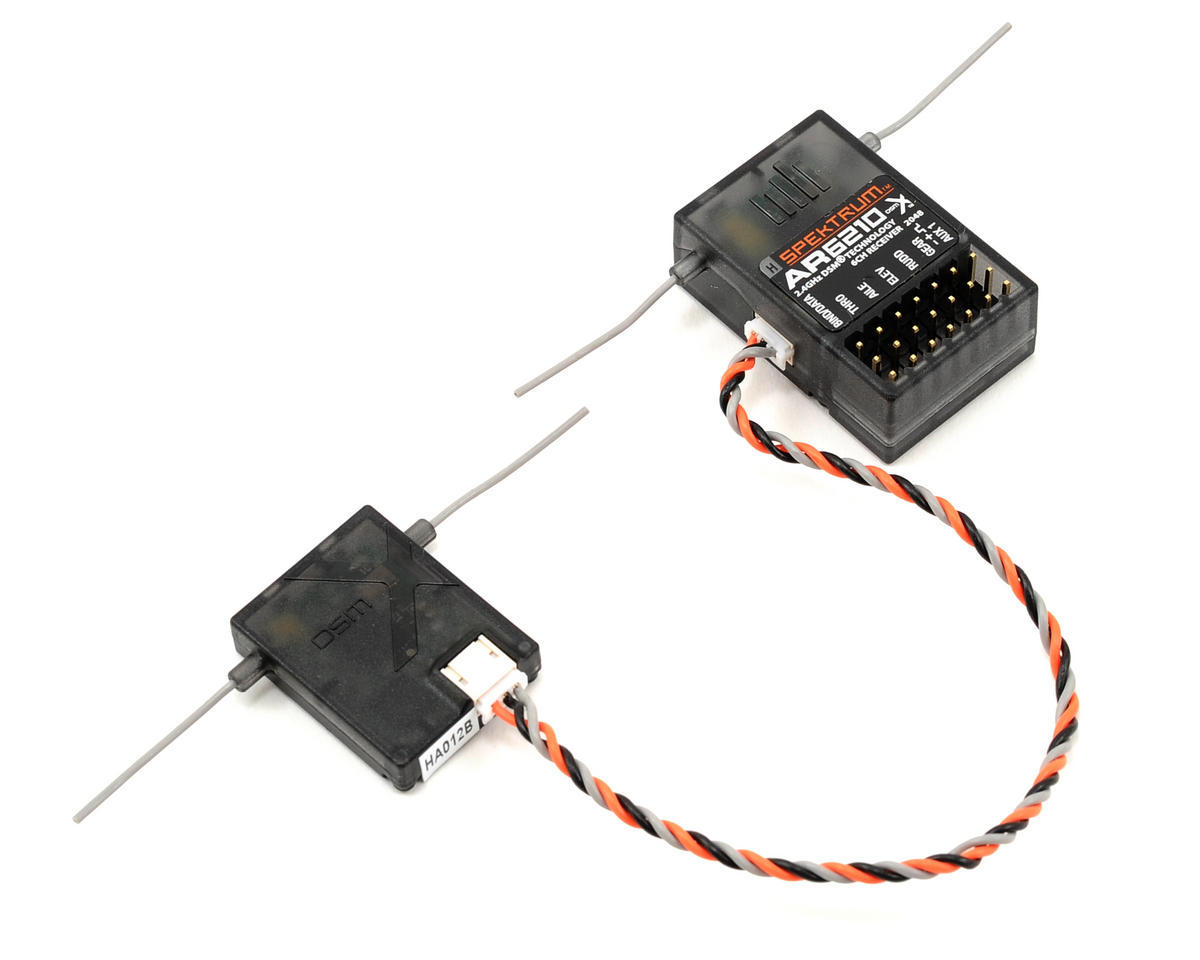
AR6210 RX but only the satellite connected
Glacier 2.6 A Lipo
I’ve installed latest firmware and also tested other older version like 3.1.
Some things I did:
- Adjusted Transmitter Travel so that I could get a low throttle below 1000.
- Tested each ESC by connecting directly to AR6210 to test if the motors spins. It worked fine even when only the signal wire was connected to the RX.
- Tested with USB and Lipo attached.
- Tested without GPS module.
- Tested without BEC.
Does anyone have some hints or clues on what went wrong?
Thanks,
Rodney