I’m not sure what I could do about the vibrations. I couldn’t hard mount the motors, the mounts wouldn’t allow me. The cube should neither be soft mounted. I’ve been flying this aircraft without clipping before so maybe it’s just bad tuning for the roll axis. I did some more aggressive roll inputs during the test-flight so the clipping would most likely be from that.
I’m going to keep tuning and test flying as of now and set the parameters you suggested.
The mission planner helper tool told me to set the PSC parameters you sent me and the THR_MIX_MAN from 0.1 to 0.5. Should I do that now or wait?
The psc_accz_p (0.12) term is outside of the recommended range (0.2-1.5) in mission planner.
Is this okay and how did you calculate the values. As far as I understand you calculate them from the hover-thrust. Did you look at any specific log value?
I’m intending to maybe put some payload on the vehicle at some point. And I would need to change the the PSC_ACCZ values then right?
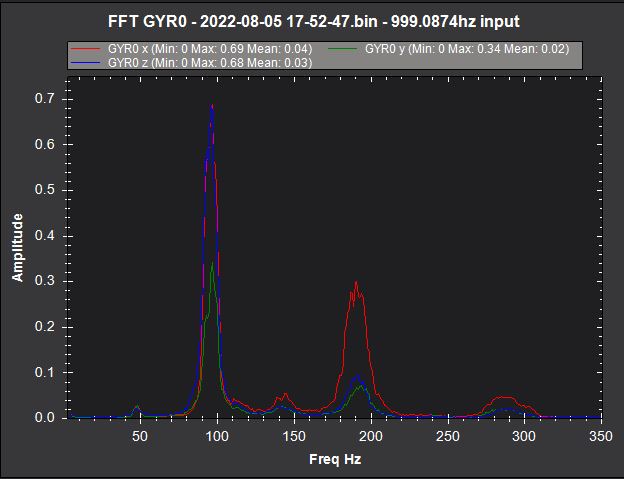
I’ve conducted a test hover in alt hold mode with the parameters you sent me. And the gyro and accel noise level was recorded successfully.
I’ve also enabled the fft, not the notch but only the fft. I’m not sure how to judge how well the fft is tracking the frequency by looking at the log. I’ve read the documentation on the fft and harmonic notch but I didn’t figure it out last time I tested it.
So, if you want to use Dynamic FFT for the notch filter then set these:
FFT_MAXHZ,325
FFT_MINHZ,40
FFT_WINDOW_SIZE,128
INS_HNTCH_ENABLE,1 (the refresh parameters)
INS_HNTCH_MODE,4
INS_HNTCH_OPTS,2
INS_HNTCH_REF,1
INS_LOG_BAT_OPT,2
Then make another AltHold hover flight so we can check the results.
Yea, just do that. These settings for a Cube Black with and F4 processor we have to check before any real flying. If it was a Cube Orange or any H7 processor FC no concern. However I use FFT on a Pixracer with an F4 and it’s fine.
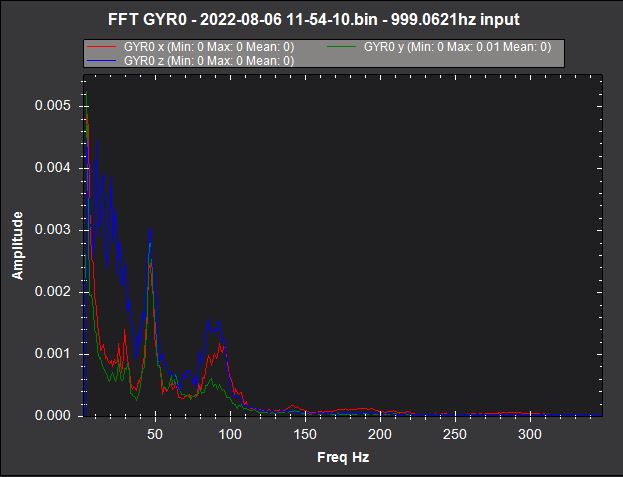
I did a test flight using the parameters you sent. It was a bit windy outside but I found a calm area although the first 40 seconds are probably the best. The last 20 a gust of wind found it’s way down to me.
Edit: I just watched the log. The vibration was better until the wind hit the drone. Then it got some clipping aswell.
The filtering also just seem to have helped the accel noise although it should just filter the gyro noise right?
ok, I’ve seen many both good and very bad results from auto-tune and many doesn’t like it these days. Will it give better results if I tune manually first, and use auto-tune for fine-tuning or won’t it matter?
ok, should I tune each individually and if I see results, go back and tune all again. Shouldn’t a bad yaw affect the tune of the other axis and a bad pitch for example affect the yaw tune??
I would Auto Tune Pitch, then set the Roll parameters equal and do a test flight. If it’s basically stable perform some more aggressive pitch and roll and then review the log for the results (desired vs actual pitch and roll in both ATT and RATE. Tune Yaw last.
But to be honest I typically manually tune everything. The down side is it’s very time consuming…
Do you have any process or steps you use to tune manually. When I do it, or rather try to do it. I use a knob on the remote and do as the autopilot wiki says. But I don’t review logs.
It is actually but right, use live tuning on a transmitter pot and make 5-6 adjustments giving some rather aggressive pitch or roll commands after each adjustment and then graph the tuning channel (RCIN6) and desired vs actual pitch or roll and determine what setting has the best response of desired vs actual overlaying without oscillation or overshoot.