Hi guys!
I’m have quad with Pixhawk (3.4.5 - Latest Stable), a Tarot 650 frame with T-motor 2012-13 (kv340).
So the thing is when i used only the vibration mount plate with the pixhawk on top the everything was working good, just had the Vibe Z too high (above 30 /40 when doing auto missions but everything else was working very well). I was using a 12k 6s lipo.
So my idea was to try to remove that vibe and i put a foam* between the vibration mount plate and the pixhawk and the vibes went down, at least in my initial flights and using a 5000mah lipo 6s.
The problems started when i start to test my 12000mah 6s, very unresponsive in althold.
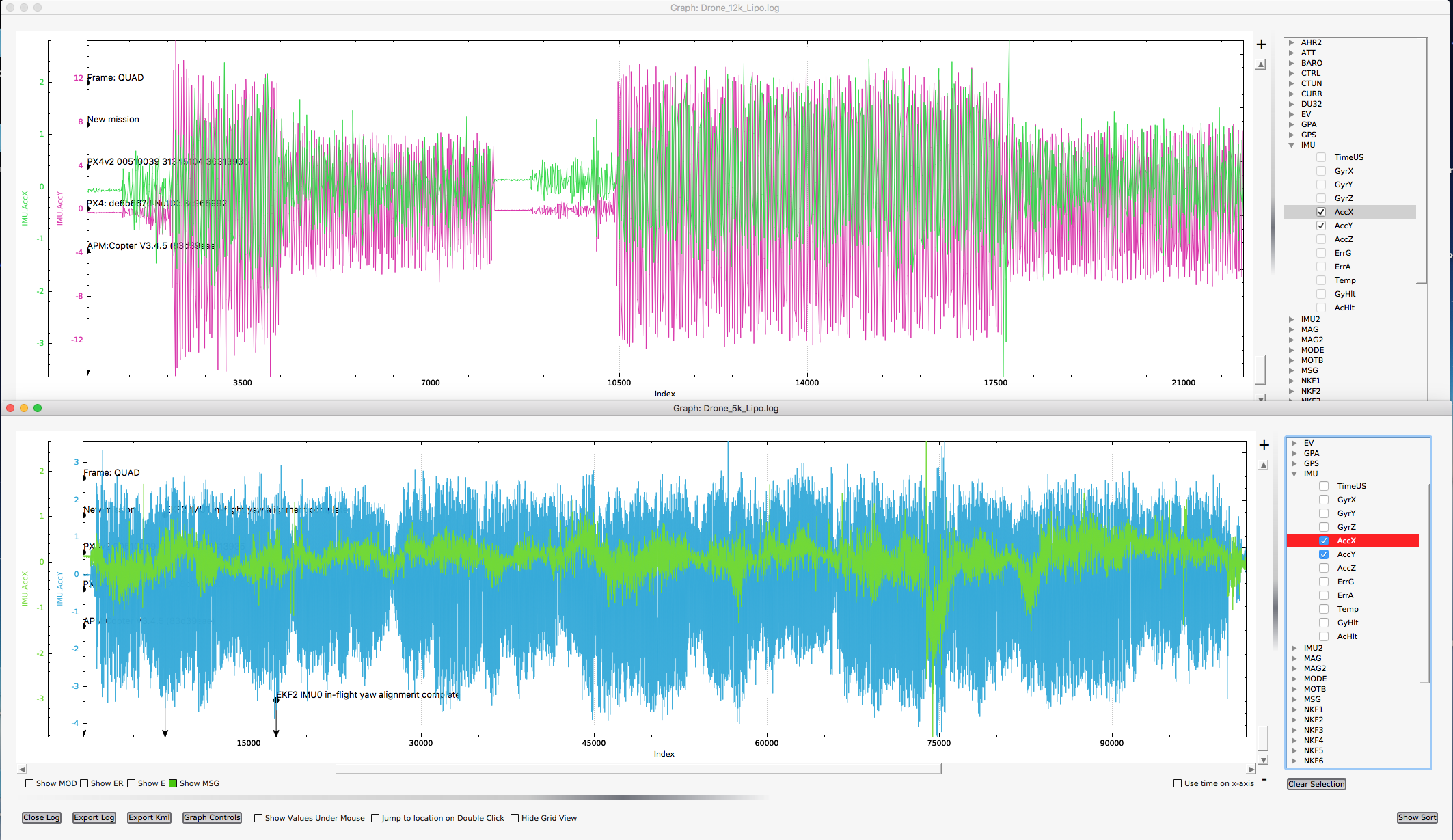
Using the foam with 12k lipo log:
https://drive.google.com/file/d/0Bxn0zmjADHHVeHdTVGdrVEc5ZmM/view?usp=sharing
Using the foam with 5k lipo log:
https://drive.google.com/file/d/0Bxn0zmjADHHVajl2WmN0SEoxdGs/view?usp=sharing
When i land with the 5k lipo the pixhawk do what is supposed to do and i can disarmed with my RC.
But when i use the 12k the pixhawk keeps the motor running in high rpm and wont let me disarmed with RC, i have to disarmed with the GSC.
Any thoughts what could it be? Vibes?
The last problem is that i cant connect** the pixhawk using the USB cable to the pc, the IO board led wont start. But if i connect the lipo everything boot up and if i connect the usb cable i can connect to my pc.
The pixhawk is a chinese clone, i think.
Any thoughts what could this be when looking at the logs, too much foam? anything more serious than that?
Thank you guys.
And sorry for all this questions, i’m a new pixhawk fan (i used to use a quad with a dji wkm).
- image with the foam: https://drive.google.com/file/d/0Bxn0zmjADHHVUS1WalhpUVMyb0U/view?usp=sharing
** image with the red light: https://drive.google.com/file/d/0Bxn0zmjADHHVUTVicUFHNEtoalU/view?usp=sharing
edit. fixed the link to the 12k log (sorry, i put the wrong one but now is the correct one)