I am using 3.4 to flying a mini heli, when I switch from stabilize to poshold a little suddenly, it just flied to earth vertically. Could some tell me what may cause this problem? Thanks!
Share the log, otherwise it might be difficult to know.
Hi,
I think you switched to PosHold before arming. I’ve made the same mistake before and it can be painful and expensive…
You can avoid taking off without arming by properly setting up the RSC.
I did switch from Stabilize to Poshold
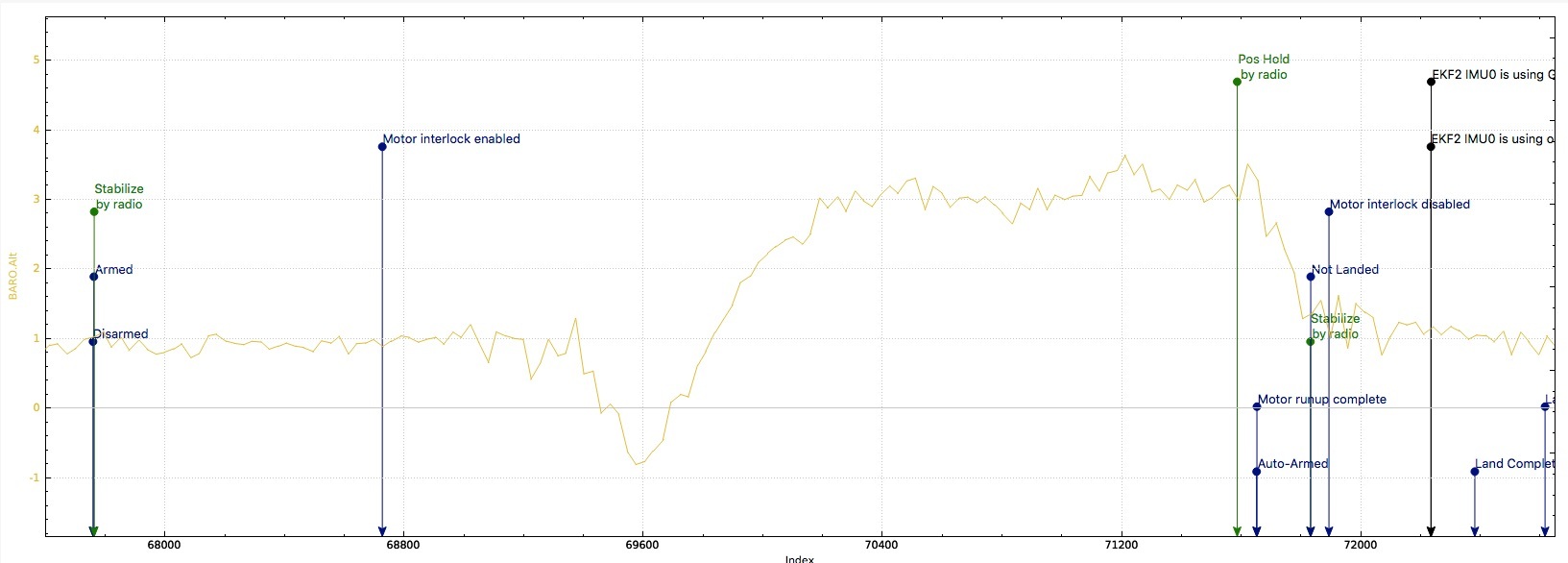
I checked your log and it shows that this in fact was the case. Switch to PosHold event happened before “Motor runup complete” and “Auto-Armed” events were triggered.
How did you get this fig? Thanks
I used APM Planner 2’s Graph function, but you can use Mission Planner too.
Could you give me the detailed? Thanks
I’ve created a PR which I think may resolve the issue found here
We can push this out for beta testing (along with some other fixes) almost immediately if I can just get confirmation from a heli expert that it’s correct.
1 Like
I did not find this function, could you give more details kindly? Thanks
Thanks! Hope for more information from experts!
This is great!
GPS and IMU relative to the location of the installation settings are also added to the beta version of FW
Hi Randy-san,
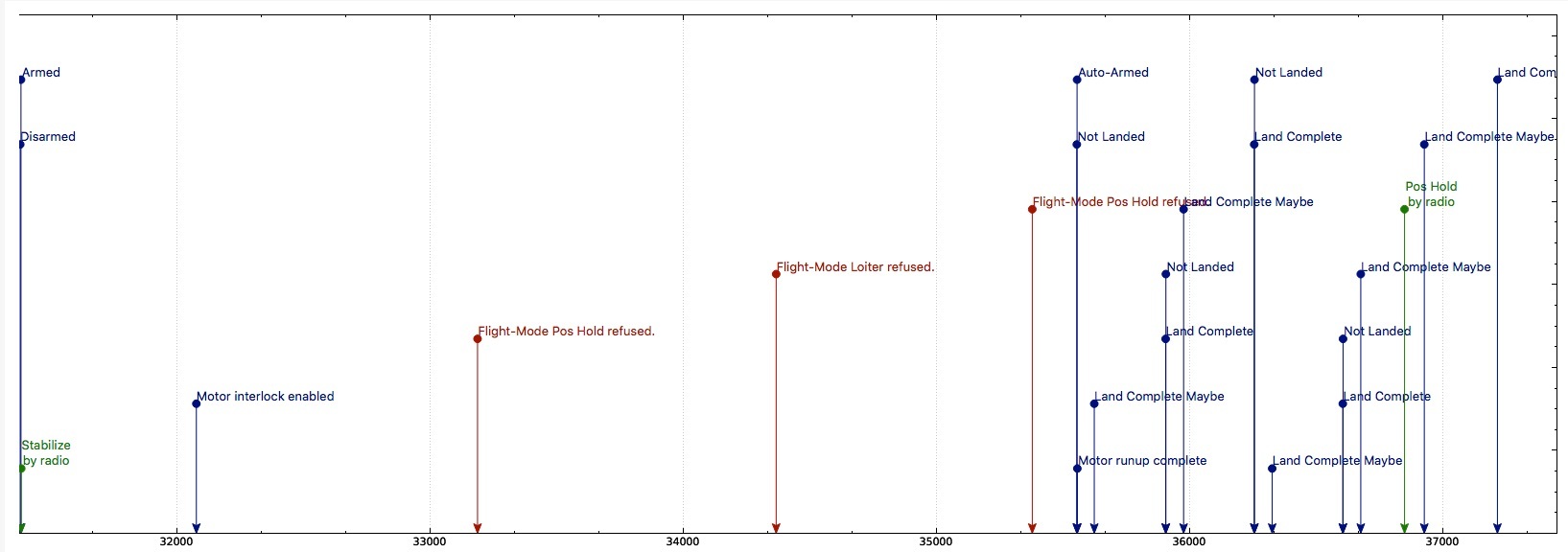
I applied your patch onto AC-3.4.3 and took it out for a test flight today. The heli refused to take-off before run-up was completed, so I can confirm it’s working.
(EDIT: I should have said “refused to switch to PosHold before run-up was completed” as it was the original issue discussed here and what the graph shows. However, I was also testing to see if the copter would take-off before run-up was completed and it did not, and that’s what I was referring to above).
Thank you for taking care of this very quickly!
I just realized that the graphing function of APM Planner 2 is entirely missing from the documentation. However, if you install and run the app, the “Graphs” menu icon is right at the top of the screen, and you won’t miss it.
If you are using Mission Planner, here’s a direct link to the log analysis function documentation.
http://ardupilot.org/planner/docs/common-downloading-and-analyzing-data-logs-in-mission-planner.html
Where I can find this? Thanks
Almost there.
You probably want to graph the mode switching events against some other data so that you have some reference as to which part of the flight you are looking at. You can select an RC input channel like CH3, to see your RC throttle inputs, or use the altitude data from the barometer, which is what I did in the previous graph posted.
Using altitude as a reference made sense to me as you mentioned that the heli dropped in altitude right after switching to PosHold.
Goro, thanks for testing. So I hope to push out AC3.4.4-rc1 within a few days (certainly before monday) so that beta testing can start on it. Then usually about a week later we make it the official version (assuming nothing bad happens).
The beta release is just a patch on top of AC3.4.3 so all the big changes going into master won’t be included. So no sensor offset features will be in this beta. For big releases we need to test them for at least a month before we’re sure we’ve gotten the majority of the bugs out of it. We’re aiming to start beta testing of AC3.5 in early January.