I have a bought a no brand Pixhawk (2.4.6 and 2.4.8), I have purchased it to build a quadcopter.
I am having some trouble getting them to work. I have read some place that the latest firmware known to work with them is ArduCopter-3.2.1. Unfortunately, this firmware it is too old and I could only find the source code and not the precompiled version. Could someone please point me to either how I can compile the old version or where I can download this firmware?
There may be a bit of confusion going on here.An APM can be numbered 2.5/2.6/2.7/ or 2.8.
A Pixhawk can be numbered 2.4.6 or 2.4.8.
The APMs can only use up to and including AC 3.2.1. The Pixhawks can use the current releases including betas.To load 3.2.1 on an APM you will have to select Pick Previous Firmwares from the drop down in Mission Planner.Then it’s under AR 2.5/AP 3.3/AC 3.2.1.
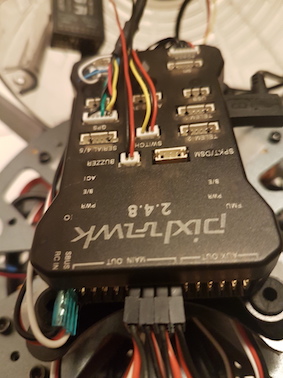
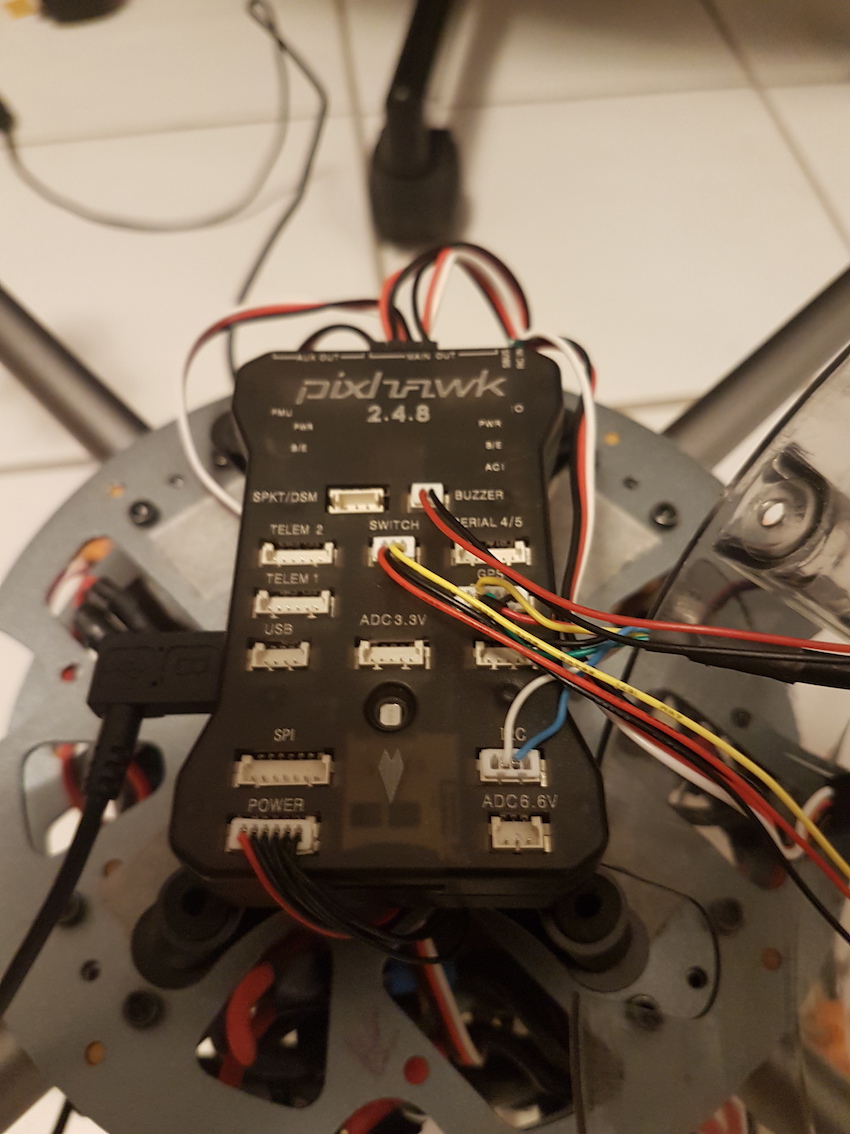
If you can post a picture of the flight controllers.we can identify it for you.
Here is the blog post referring to Pixhawk clone not working with firmware above 3.2.1. As requested by Jagger, I have attached the pictures of both Flight Controller.
I am having a hard time getting everything setup and working. My main issue is getting the FC working with my ESC. The setup works fine with Cleanflight and not with the Pixhawk.
I was able to to to calibrate the ESC and all sensors checked out fine, I was even able to arm and spin the motors. But there are a few anomalies that I saw.
During Motor test, I was unable to get the system to “Test all in Sequence”.
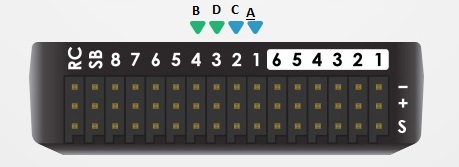
The ESC pin in the Pixhawk seem to be mismatch, I used the picture in the instruction and labelled each connection with a Letter (i.e Motor A, Motor B, etc…) same as in Mission Planner. See Picture 3. When armed the copter, the motors spins quite fast right away. I am almost afraid it would take off when I have Props on. Is there away to adjust that?
I’ve never had test all motors in sequence spin more than one motor.Test all motors is fine.
The wiring is correct and is an anomaly.Check out the initial install layout and see the diagonal numbering.But the motor test is start at front right and move clockwise.It gets to be comlicated on an octocopter.
The blog you linked to is totally wrong. Here’s a clue for you: When you launch Mission Planner connect the flight controller to the computer and select Flash Firmware, MP will scan for a serial port and the query the attached device. If MP finds an APM it will populate the frame/vehicle types with AC 3.2.1. If MP finds a Pixhawk, Pixracer, Pixhack, etc, MP will populate the frame types with the latest version of ArduPilot for that specific frame/vehicle.
You mentioned Clean Flight, and I’m wondering what frame, ESCs, motors and flight controller you were/are using and why you moved to a Pixhawk.
Well all seem to work fine. I get a flashing blue light before GPS lock and a green light after. Magnometer, Gyroscope and ESC all calibrated successfully. Engine are properly mounted and and the setup is fairly well balance. However, when I try to take off, the copter simply falls backward.
I mention above, the engine connection doesn’t seem to corollate with what it suppose to be on the Pixhawk. I had to plug the ESC for Engine 2 to PWM 4, Engine 4 to 3 and Engine 3 to 2.
Oldgazer1:
Motor Sequence never worked for me. It spins engine 1 and then stop. I am using Turnigy HAL Frame, Andoer® Hobbywing SkyWalker 60A Brushless ESC Speed Controller With UBEC, Turnigy D3536/5 motors.
I am new to the hobby and for what I want to do, I realised that Cleanflight will not work.
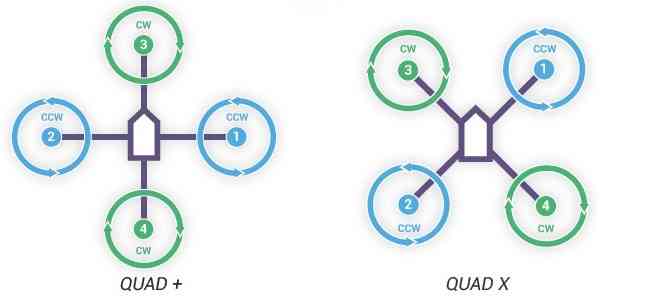
Output 1 from the FC goes to motor 1 at front right.
Output 2 from the FC goes to motor 2 at rear left.
Output 3 from the FC goes to motor 3 at front left
Output 4 from the FC goes to motor 4 at rear right.
All as per the diagram I posted above.
This is where you must plug each motor in.Then, using motor test,if the motor spins the wrong direction swap two wires feeding the motor from the ESC.It will then spin correctly.Do that for all four and they will now be spinning correctly and you have a chance of it lifting off level if you get the props on right.
Forget about A,B,C,and D.Just use those to spin motors 1,2,3 and 4 when you need to test rotation.
I’ve built a lot of copters and I always have a print out of the motor order in front of me when I’m wiring up.Always.
When you CONNECT the ESCs to the Pixhawk, Motor 1 goes to PWM1, Motor 2 goes to PWM2, Motor 3 goes to PWM3, and Motor 4 goes to PWM4. FOR THE AIRCRAFT TO FLY PROPERLY YOU MUST USE THIS CONNECTION ORDER…
On the aircraft, Motor 1 is Right Front, Motor 2 is Left Rear, Motor 3 is Left Front, and Motor 4 is Right Rear.
Motors 1 and 2 turn Counter Clock Wise (CCW). Motors 3 and 4 turn Click Wise (CW).
When you run Motor Test, you can change the amount of throttle (I use between 10 and 15%) and how long the motors will run.
When you run Motor Test, Motor A is Right Front. Motor B is Right Rear, Motor C is Left Rear, and Motor D is Left Front. Hint: The motor testing sequence has NOTHING TO DO WITH MOTOR ORDER. The purpose of Motor Testing is to make sure each motor turns in the proper direction.
Your aircraft is tipping over because you have the motor order WRONG…
Thank you thank you. I just had my first successful flight. the Quadcopther was rock solid.
Oldgazer1 & Jagger: you were absolutely right, I rewired the ESC to the correct engine and it worked like a charm. I was so excited that I ran the Quadcopter in a tree hahaha, all my fault.