hey
I’m trying to make progress and get my pixhawk to communicate per uavcan, but it doesn’t seem to be as easy as I thought
first, I’m actually not sure where I should ask these questions, here or at uavcan google. On the one hand my questions are clearly very ArduCopter related, but on the other hand Pavel isn’t often here. Maybe you could give me an indication.
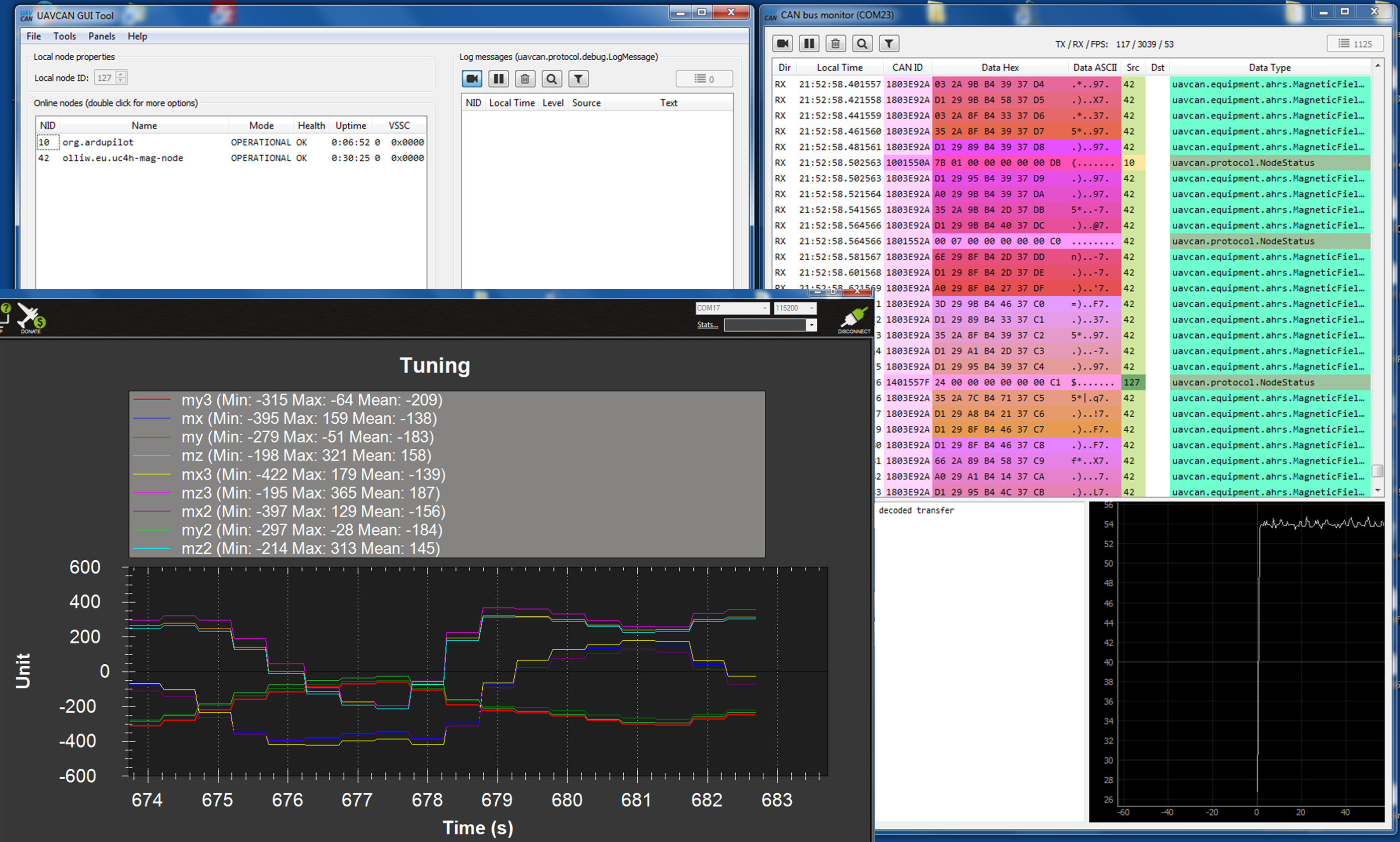
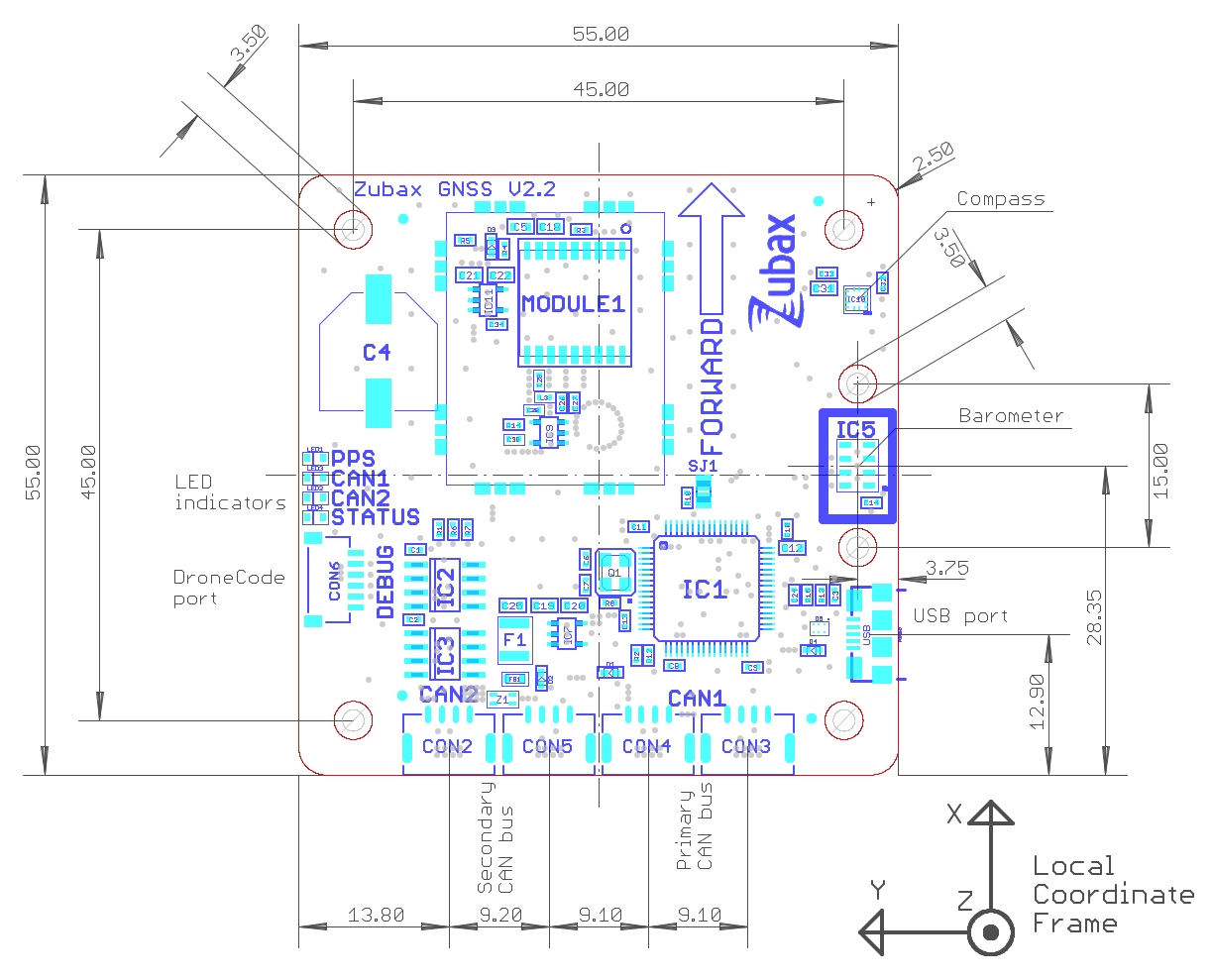
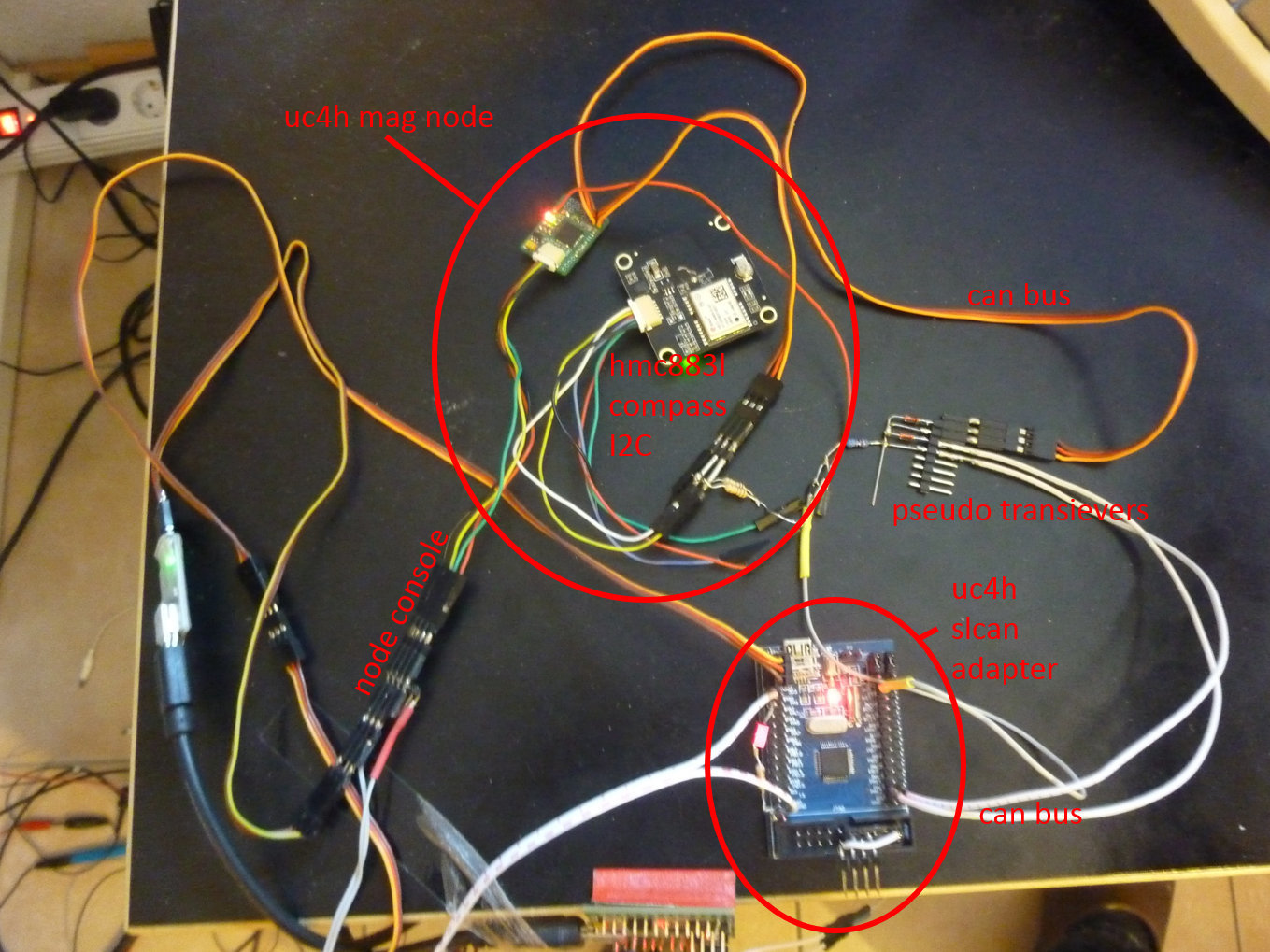
my hardware: Auav-X2 first generation, slcan adapter and node (UC ID 42) as in the above, the node or the slcan adapter is connected via a SN65HVD230 transceiver to the CAN ports of the AuavX2 (as in uavcan hardware docu).
I first tried it with the AC firmware I had installed on the AuavX2, namely AC 3.4-rc5. It had just one Uavcan parameter, which I’ve set to 1. Not 2, not 3, 1. According to an issue in the git repository that’s appropriate. Nothing happened. On the AuavX2’s CanH&CanL pins I see about 2V, but absolutely no action.
I then downloaded the latest V3.6-dev, ArduCopter-v2.px4 from APR 15 00:01 (I also have the latest MP). I do see now several more CAN and Uavcan related parameters, which are
BRD_CAN_BITRATE 1000000
BRD_CAN_DEBUG 2
BRD_CAN_ENABLE 1
BRD_CAN_UC_EN 1
BRD_CAN_UC_NODE 10
However, exactly same result, absolutely no action on the AuavX2’s CanH&CanL pins.
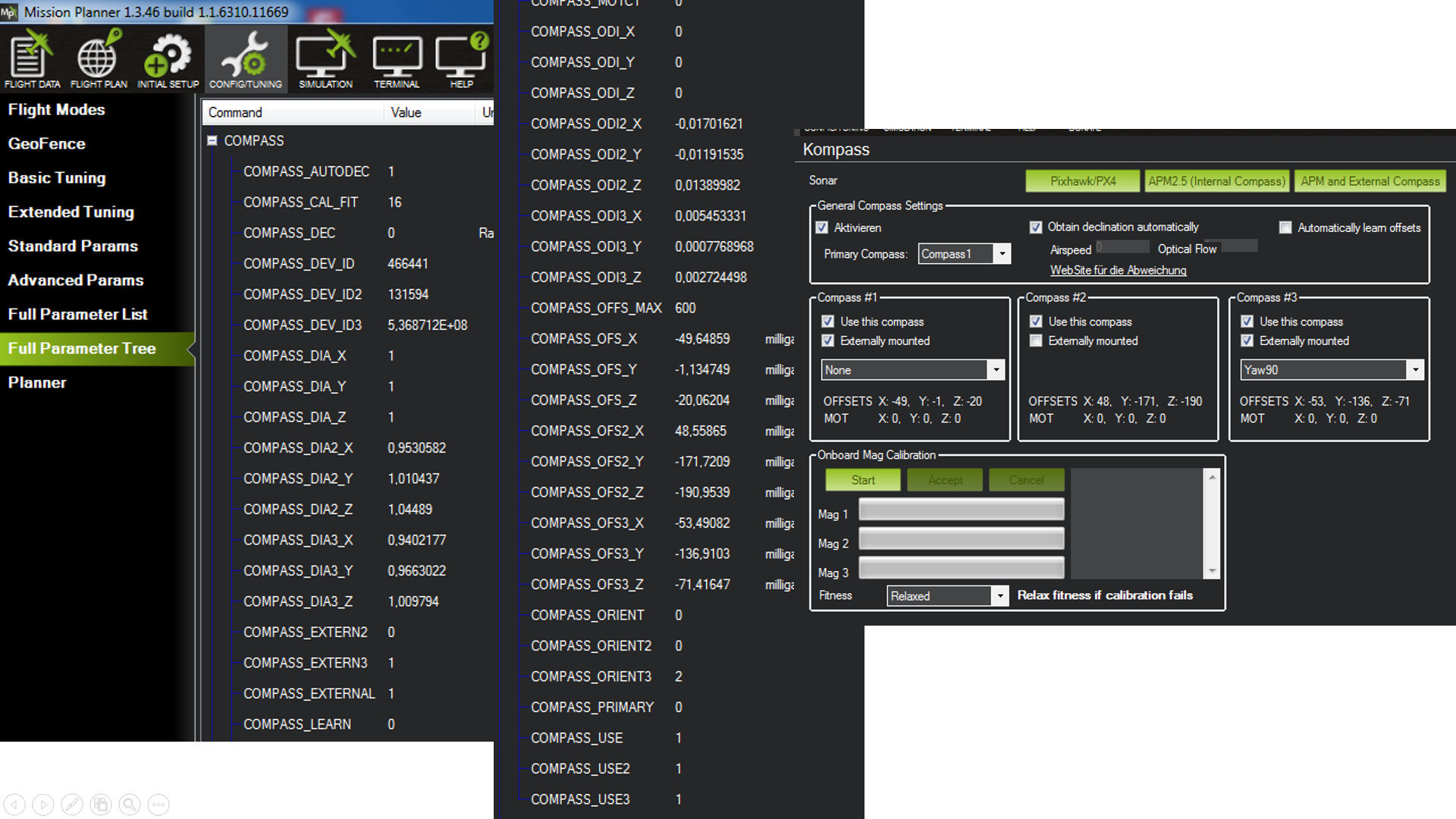
In MissionPlanner OptionalHardware Uavcan page, the Uavcan is shown as enabled, but the buttons, e.g. StartEnumeration etc., are disabled.
A 3rd Compass #3 seems to be “detected”, i.e. I see a parameter COMPASS_DEV_ID3 5.368712E+08. It’s value is however independent on whether the node is connected or not.
Also in the MandatoryHardware Compass page, the compass #3 is now checked as ExternallyMounted.
In the FlightData Tunning Window, when I check mx3,my3,mz3, no data is displayed.
I’ve carefully rechecked that my slcan adapter and uc4h node do work properly together, and that I got the wiring correct.
??
Thx, and cheers
Olli
EDIT:
I wonder, is there maybe any dependency which is required for (uav)CAN to be activated which I’m overlooking? E.g., I was thinking it could be the transceiver on the AuavX2; the newer transceivers have a CAN-5V detection&disable safety feature, but on the AuavX2 it is a Max3051 which is essentially identical to the Sn65hvd230, i.e., no such feature. Anyway, I maybe should precise the hardware setup: it’s the AuavX2 with a Gps+external mag connected (uart+i2c), the beeper+saftey switch, powered by USB, nothing else.

 If there would be at least an errata sheet.
If there would be at least an errata sheet.