@Rolf, thanks for the log, that helps a lot!
@Rolf,
The reason the throttle on the forward motors went to close to zero during the last part of the transition was that the aircraft was gaining height. Until the rotors have tilted all the way forward the multicopter controller is still in control of the rotors. The controller is being asked to maintain height - it is essentially in QHOVER mode as far as the multicopter controller is concerned. The vehicle was gaining height, so it lowered the throttle to try to stop climbing.
Cheers, Tridge
Hi Trdge, thanks for the fast respond. I have very well pulled on the elevator-stick, because the aircraft lost height ?
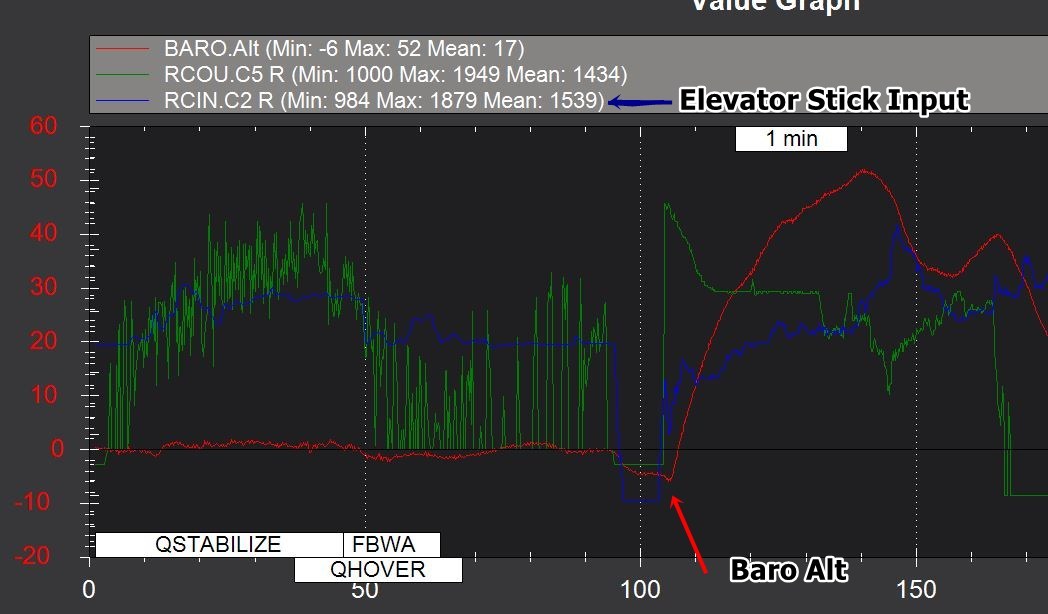
Regards Rolf
hmm, you’re right, sorry, I’ll look again!
@Rolf, ok, got it this time, and it is a bug.
The vertical throttle in the “timer wait” part of the transition (when waiting for Q_TRANSITION_MS to timeout after reaching target airspeed) uses a stabilize throttle, not a hover throttle. It slowly lowers the throttle starting at the throttle it was using at the point it reached the target airspeed:
See:
https://github.com/ArduPilot/ardupilot/blob/master/ArduPlane/quadplane.cpp#L1057
In my pending tiltrotor PR I have changed it so it never lowers target throttle to zero while in the transition wait:
https://github.com/tridge/ardupilot/blob/pr-plane-binary-tilt/ArduPlane/quadplane.cpp#L1068
so it will keep stabilizing. As the fwd rotors are tilted forward, they will get a larger amount of thrust for pitch stability, so you will get more forward throttle in this stage of the transition.
Thanks for noticing this, and thanks also for not accepting my bogus initial answer!
Cheers, Tridge
thanks for looking again and fixing the bug. Important to know: Q-TRANSITION_MS ist starting after reaching target airspeed. Until we have the possibility to install a compiled version, we will try changing Q_TRANSITION_MS from 5000 to minimal ie 10,
Success!!
I’ve flown the CL84 tiltwing with ArduPilot and it flew very nicely. Did several manual flights with transition, then did 3 full auto flights (auto VTOL takeoff, auto-transition, auto-mission and auto VTOL land).
Unfortunately on the last auto-land one of the front propellers came off. Turns out the left/right props were mislabelled from the factory, so the nuts were self-loosening instead of self-tightening. It crashed hard when it lost the prop while hovering, but looks to be repairable.
I’ll post some videos later today.
Cheers, Tridge
1 Like
@tridge: Congratulations and thanks very much. As soon as our aircraft is repaired, we will test the tiltrotor.
Here is a video of the flying today:
I’ll upload logs and parameters soon.
Note that I flew with a 5.2Ah 4S battery, which is much larger than the recommended 2.6Ah. It is a 10C multistar though, so lighter than a normal 5Ah
I’ve added a blog post on the test flights here:
http://discuss.ardupilot.org/t/ardupilot-flying-on-the-cl84-tiltwing-vtol-aircraft/14353
I’ve put a log file of one of the auto missions here:
http://uav.tridgell.net/CL84/2017-01-25-flight3.bin
and the parameters I used here:
http://uav.tridgell.net/CL84/cl84-parameters.parm
The servo mapping I used was:
- SERVO1: aileron
- SERVO2: elevator
- SERVO5: front right motor
- SERVO6: front left motor
- SERVO7: rear motor
- SERVO9: main wing tilt mechanism
- SERVO10: tail tilt servo
I used a 5.2Ah multistar (10C) battery, which is quite a bit bigger than the recommended battery, but its what I happened to have available. I added 30g of lead to the tail to keep it balanced with the larger battery.
Other than that I used the stock motors and ESCs from the RTF kit
Hi Tridge,
I’m still alive so thanks for fixing the tilt rotor issues initially seen on the CL-84. I like the way this forum pings you lightly with updated posts so you can catch up.
Congratulations are in order to Rolf for his first successful transition to full forward flight. I hope the tree landing didn’t cause excessive damage. I was very lucky on my thick bush landing with the CL-84.
Although I have converted my CL-84 back to stock form, it really is a quick conversion back and forth to a Pixhawk with APM. I will consider converting it back during these long winter months of building. My indecision comes from the limited power of the stock design along with rather high wing-loading.
My VTOL hangar has grown to the following planes:
- FireFLY6 DIY25 with Mapping Key (tiltrotor)
- FireFLY6 DIY15 with Sport Key (tiltrotor)
- Bix3 QuadPlane
- Ranger EX QuadPlane
- CL-84 (tiltrotor)
- Ares V-Hawk X4 (tiltrotor)
I don’t have any interest in the E-flite Convergence as my focus changes to creating “productive” designs that can carry a 2.5lb-5lb (1.13kg-2.27kg) payload. The FireFLY6 and Ranger EX QuadPlane fall into this category. However, the FireFLY6, keys, and spare parts are expensive. The QuadPlane design on a low cost frame with available low cost spare parts has my main interest. The Ranger EX falls into this category and can easily carry a 5lb (2.27kg) payload. I’ll continue to look for suitable frames for testing the tiltrotor firmware. It would also be interesting to compare efficiencies between a tiltrotor implementation and a QuadPlane implementation.
Cheers!
1 Like
Tridge,
Congratulations on your successful CL-84 transitions and autonomous flights! I am glad that you found and fixed several bugs to make this happen.
I use the 3s 5.2AH Multistar packs on my FireFLY6. They make several different sizes though. What dimensions are the pack that you used? Mine are 142 x 49 x 22mm.
Cheers!
It’s this one:
I cut away some of the foam to make it fit. You can see it fitted here:
https://goo.gl/photos/pP2ayPD2fdi8is7N9
it is pushed right back against the wood of the tilt mechanism, and I added 30g of lead on the tail.
support for Q_TILT_TYPE is now in master along with the other fixes, so anyone wanting to fly a tiltrotor or tiltwing should now just use the ‘latest’ build. For a tri-copter make sure you set Q_FRAME_CLASS=7.
Ahh yes, the CL-84 uses the 4s version of my FireFLY6 3s packs which explains the height difference. Sometimes I’m slow to catch on. 
Thanks, Tridge!
Hi Tridge,
does that mean I can use 3.8.0beta1 from Missionplanner?
Thanks
Sebastian
For pixhawk “latest” build should be this file:
http://firmware.eu.ardupilot.org/Plane/latest/PX4/ArduPlane-v2.px4
Is anyone willing to try a FireFly6 with the latest APM:Plane? It should work, and does work in the simulator, but I’d appreciate feedback from someone who has the airframe and is willing to try it.
I’d be happy to provide config details if needed. I’d need to know what the servo output mapping (which output goes to each motor, which motors and CCW and which are CW, and which outputs go to the tilt mechanism). I’ll then mod the simulator to use the same output mapping and provide a set of parameter values which should fly it.